详细说明






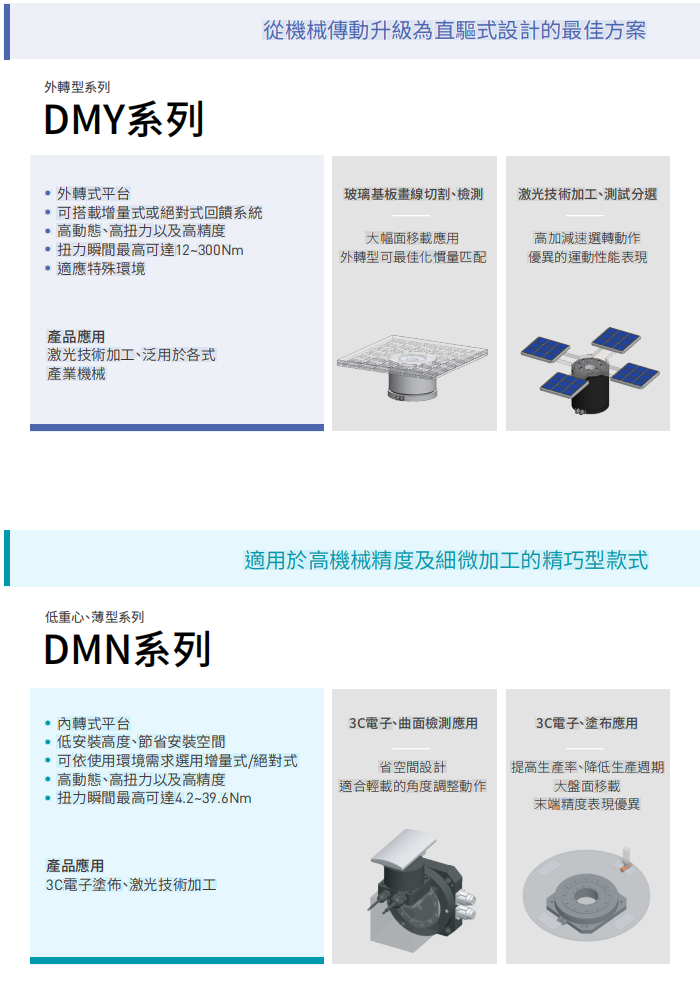

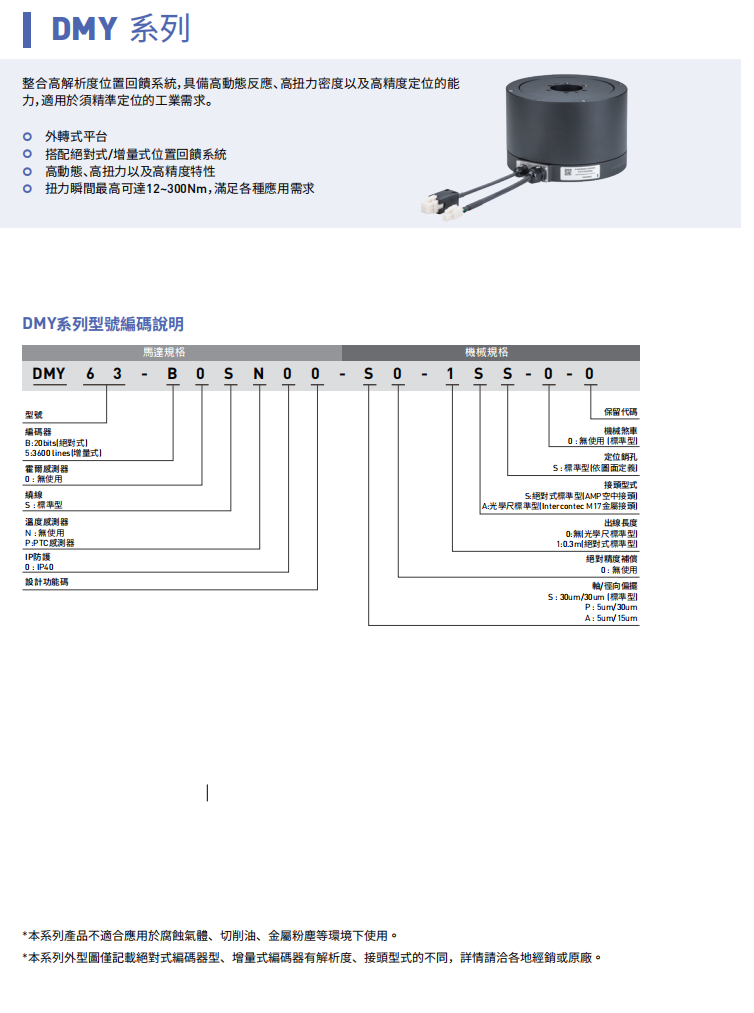
DMY 系列
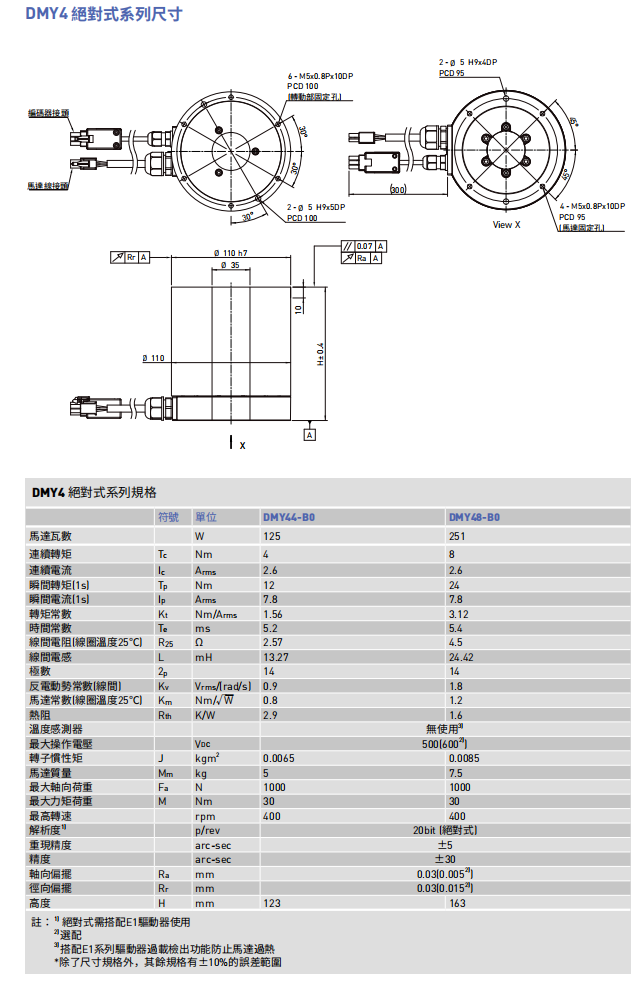
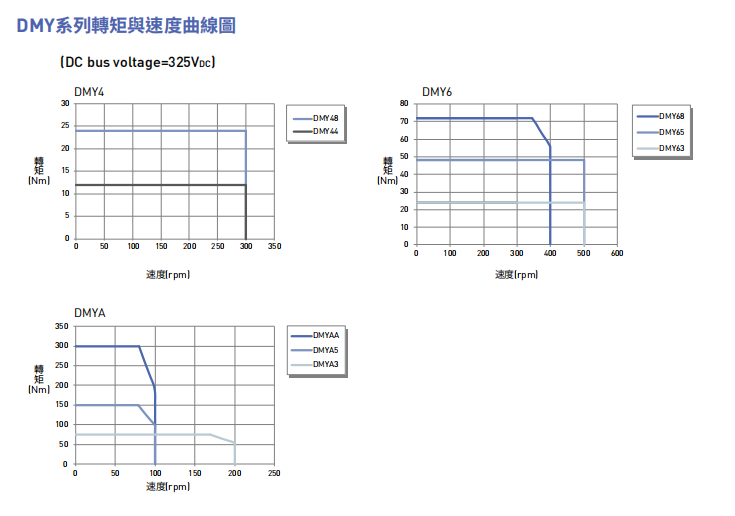
DMY4系列
DMY44- B0
DMY48-B0
DMY44-B0
DMY48-B0
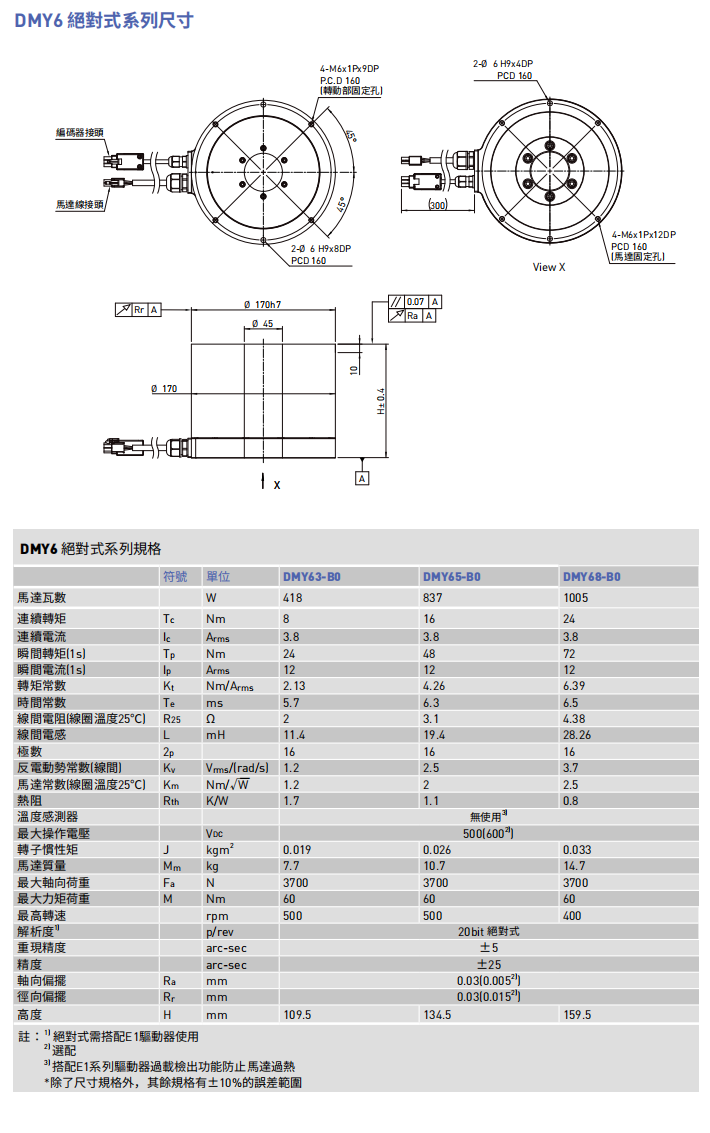
DMY6系列
DMY63-B0
DMY65-B0
DMY68-B0
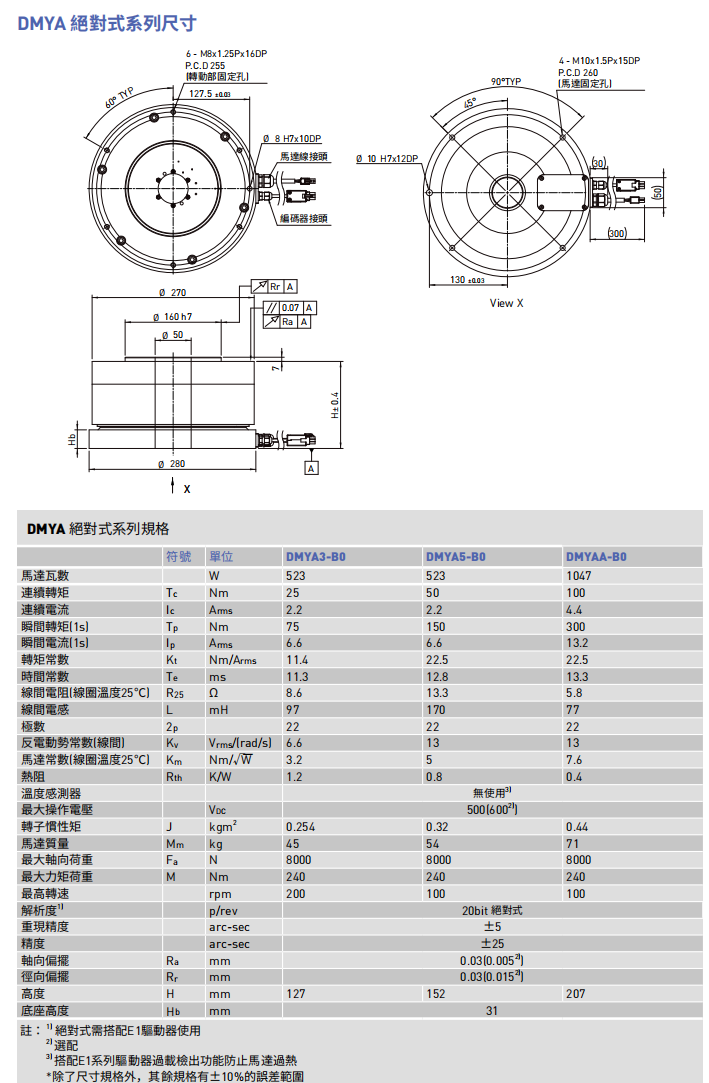
DMYA系列
DMYA3-B0
DMYA5-B0
DMYAA-B0
●外转式平台
●可搭载增量式或绝对式回馈系统
●高动态高扭力以及高精度
●扭力瞬间最高可达12-300Nm
●适应特殊环境
产品应用
激光技术加工、泛用于各式产业机械
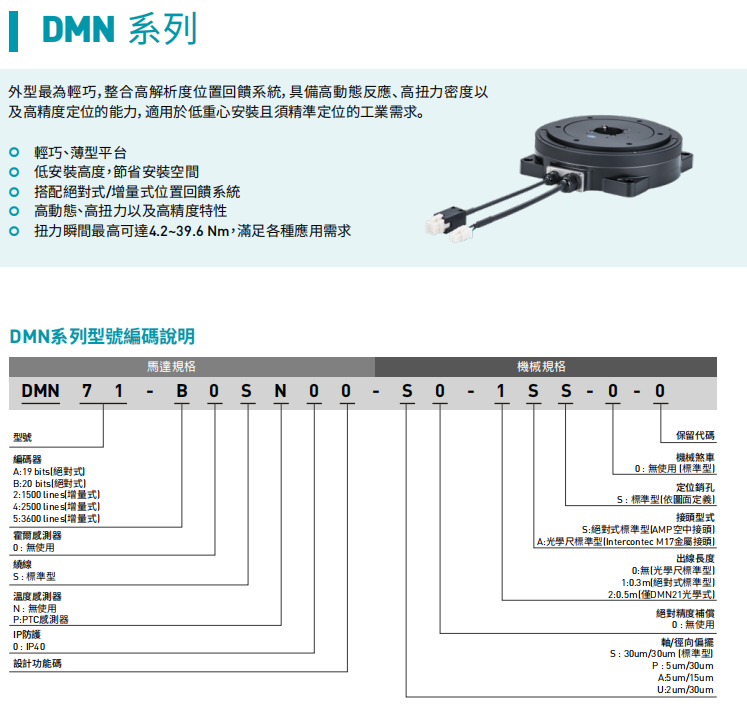
DMN 系列
DMS系列
DMS0系列
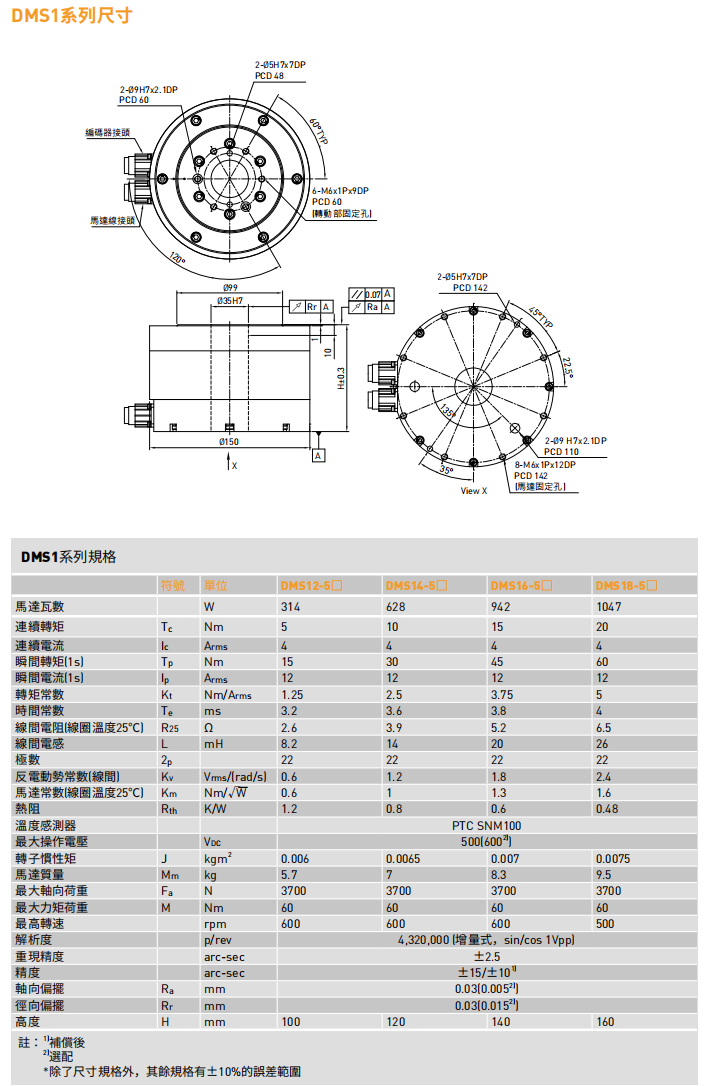
DMS1系列
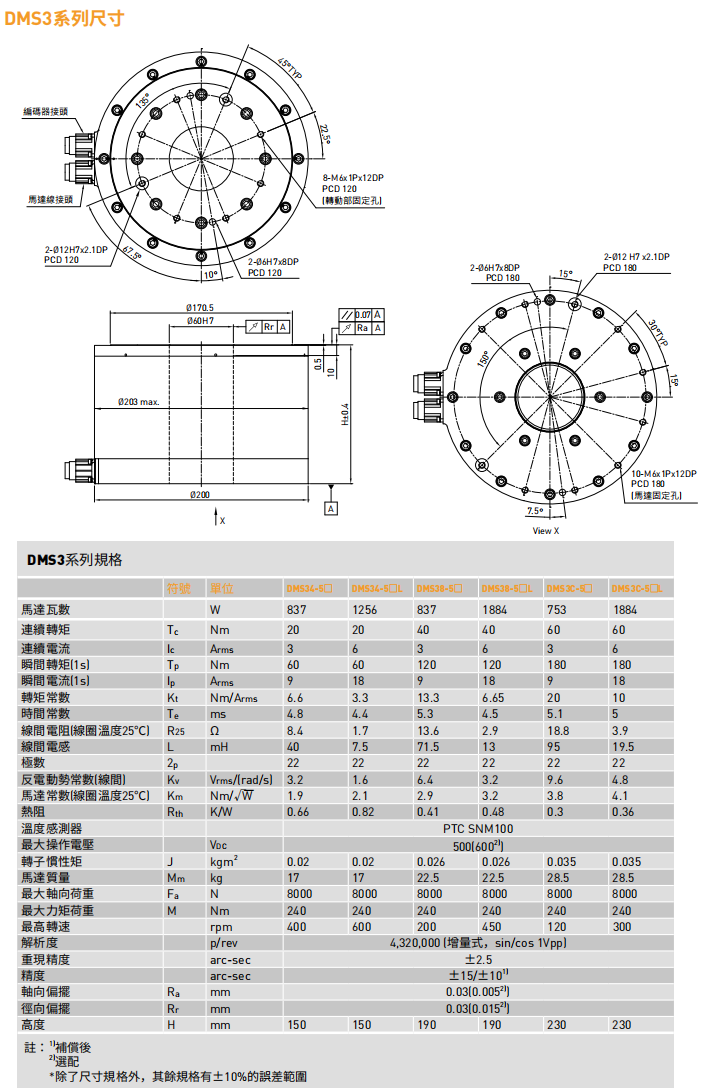
DMS3系列
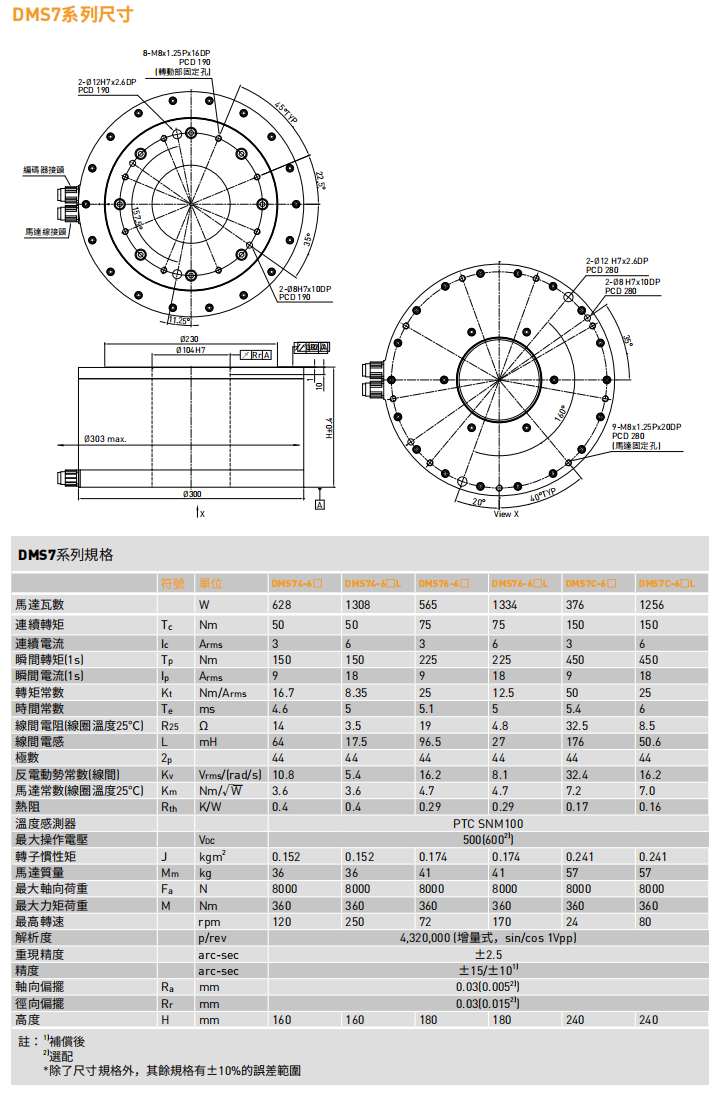
DMS7系列
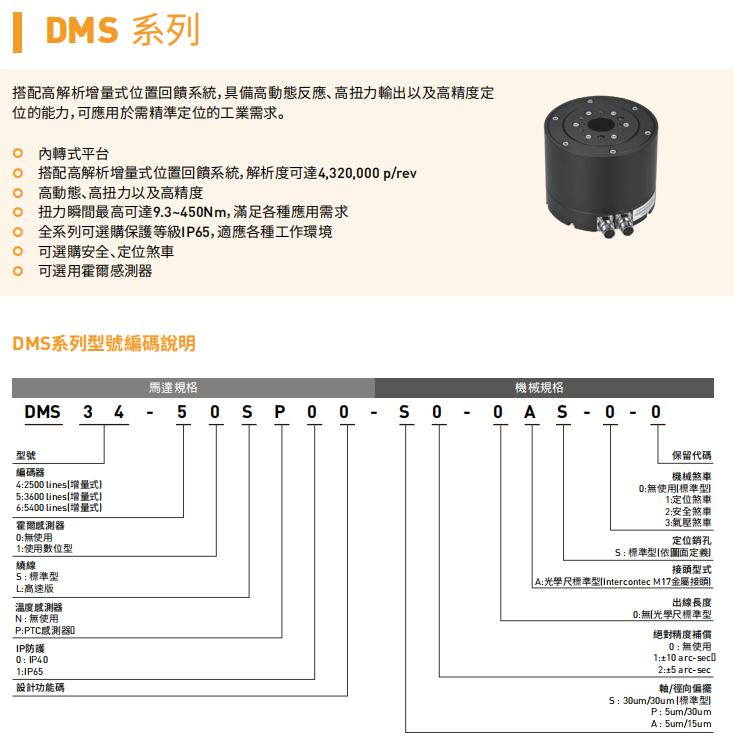
●内转式平台
●低安装高度、节省安装空间
●可依使用环境需求选用增量式/绝对式
●高动态、高扭力以及高精度
●扭力瞬间最高可达4.2~39.6Nm
产品应用
3C电子涂饰、激光技术加工
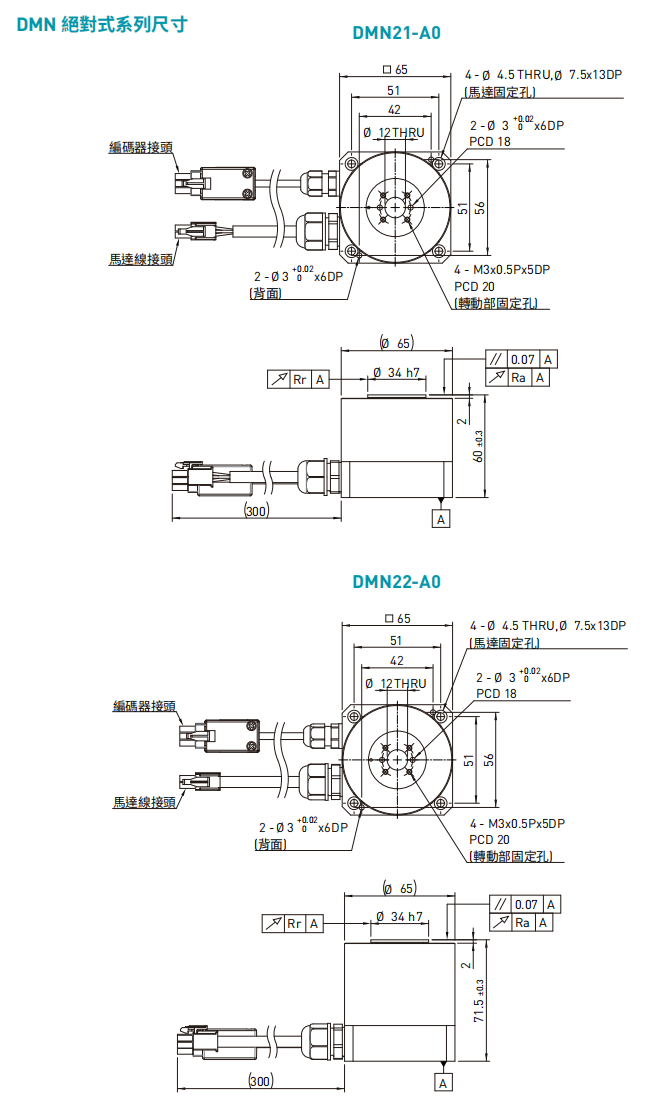
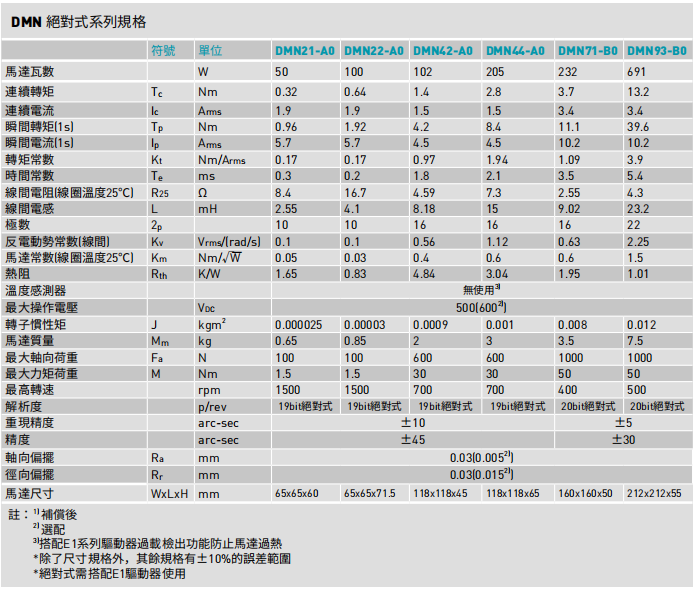
DMN絕對式系列規格
DMN絕對式系列規格
DMN21-A0
DMN22-A0
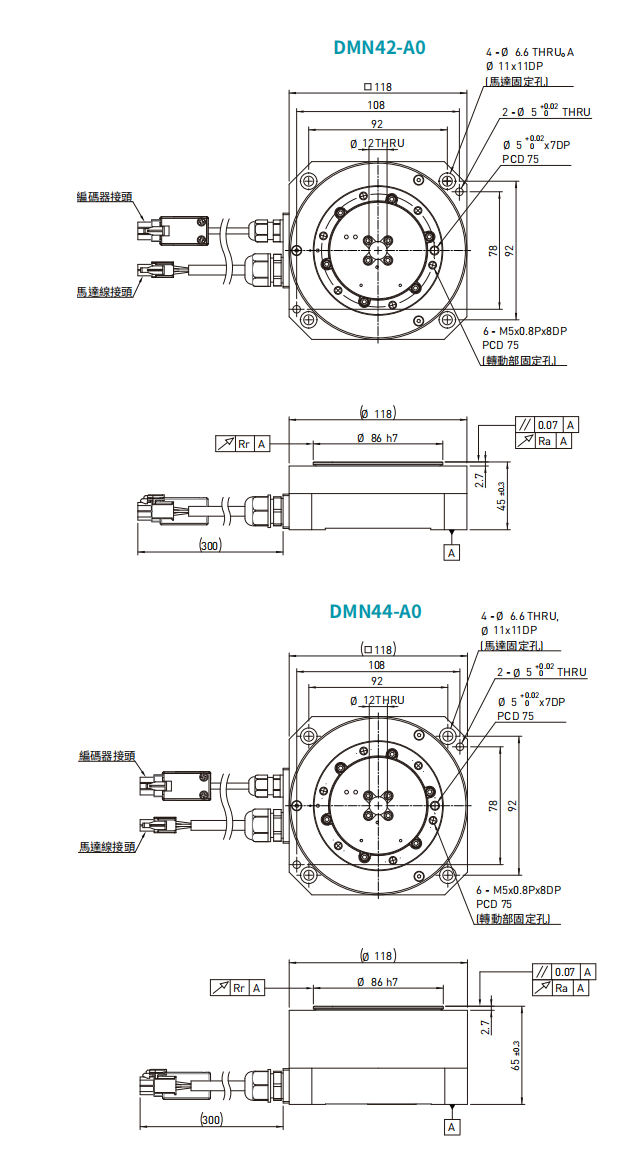
DMN42-A0
DMN44-A0
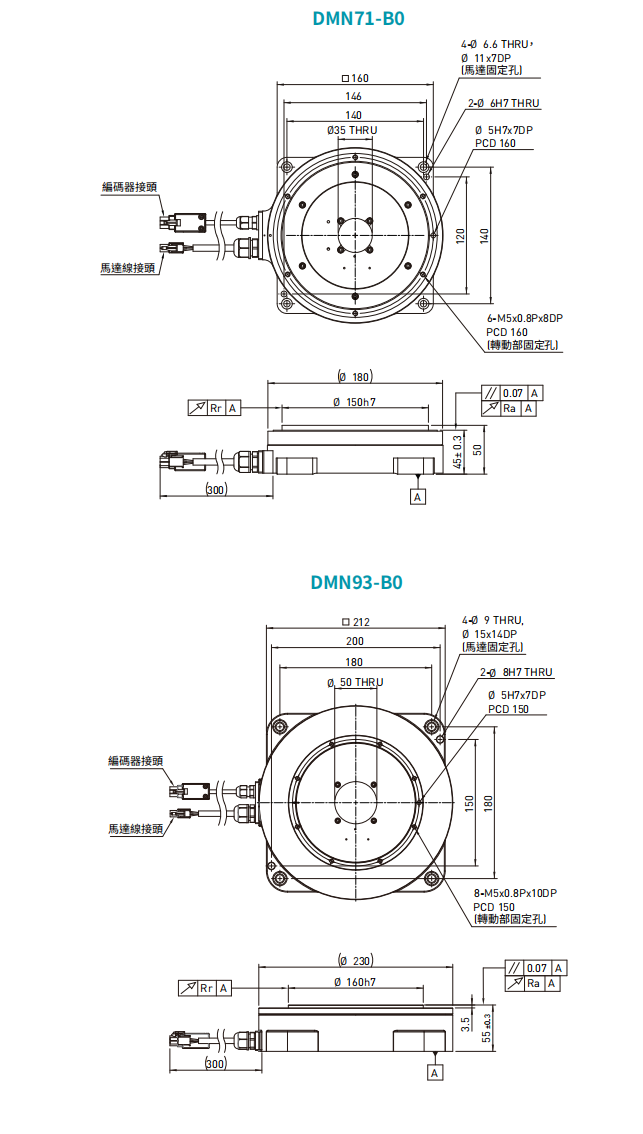
DMN71-B0
DMN93-B0
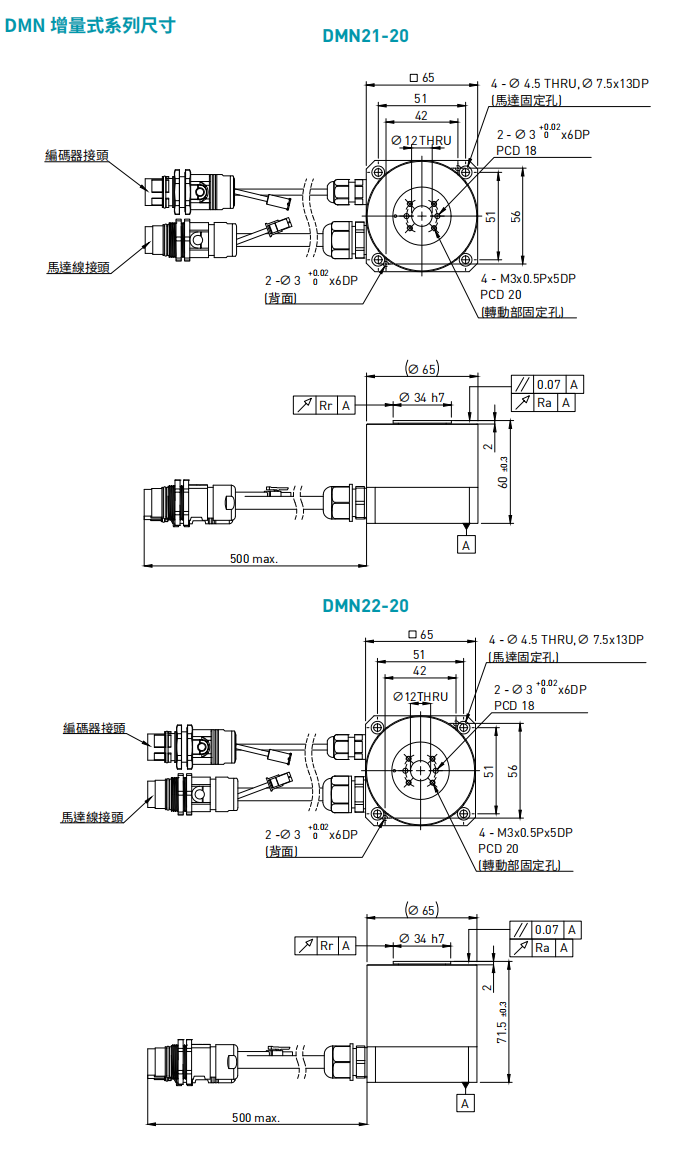
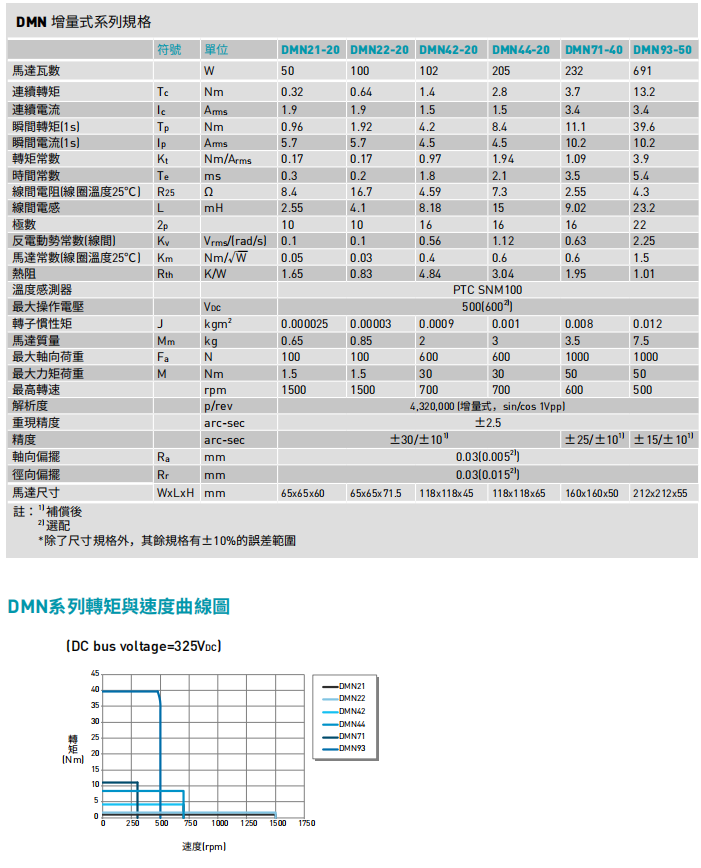
DMN增量式系列規格
DMN21-20
DMN22-20
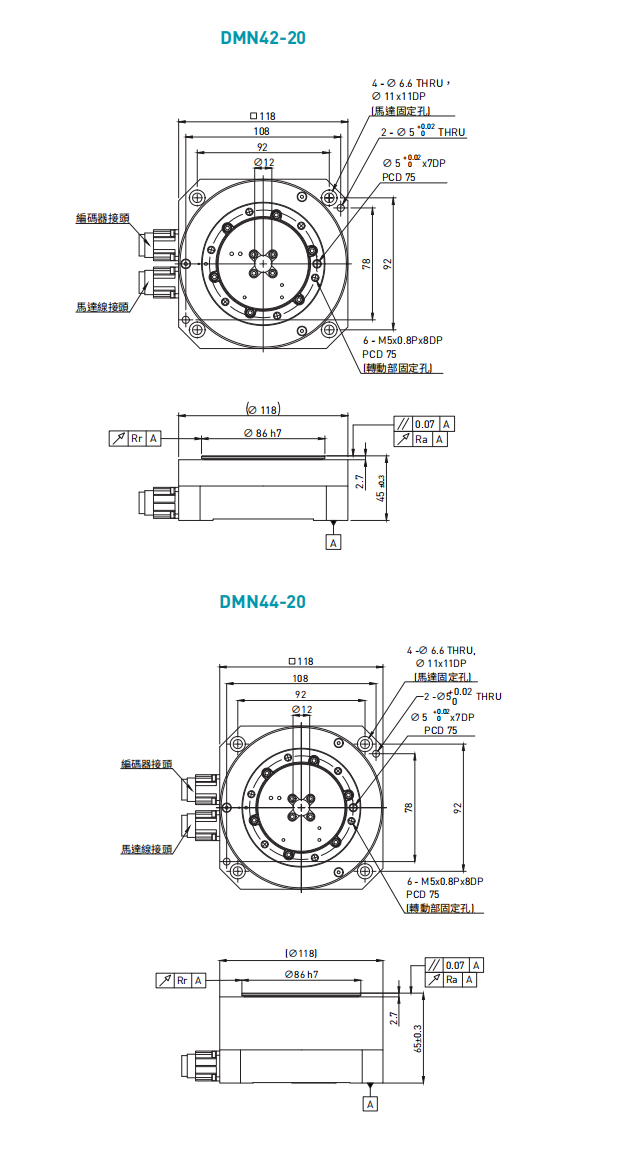
DMN42-20
DMN44-20
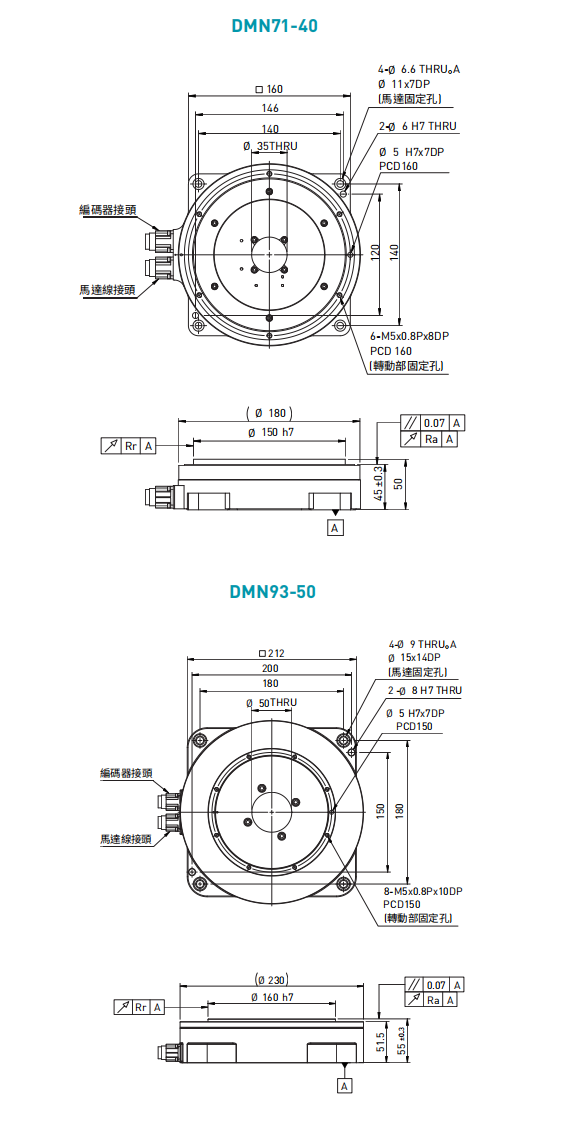
DMN71-40
DMN93-50

DMS系列
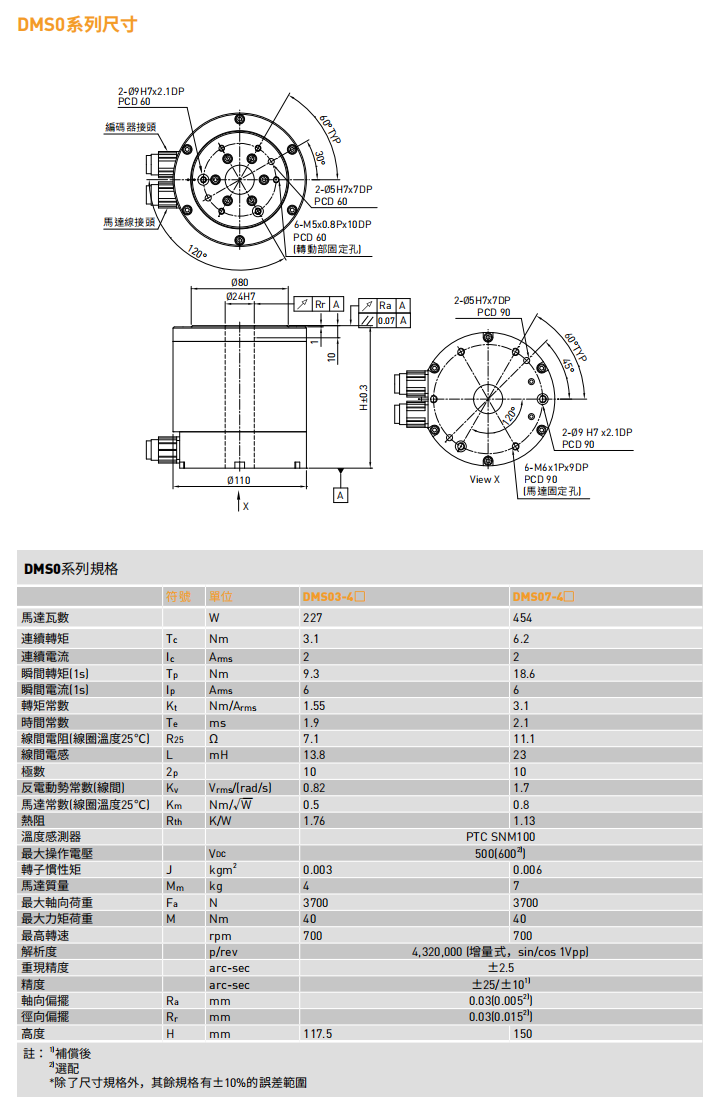
DMS0系列
DMS03-4
DMS07-4
DMS1系列
DMS12-5
DMS14-5
DMS16-5
DMS18-5
DMS3系列
DH534-5
DM534-5L
DM538-5
DM538-5L
DMS3C-5
DMS3C-5L
DMS7系列
DM574-6
DM574-6L
DM576-6
DM576-6L
DMS7C-6
DMS7C-6L
内转式平台
高解析位置回馈系统
●瞬间转矩9.3~450Nm
可选IP65防护等级
●可选安全、定位煞车
●可选用霍尔感测器
产品应用
激光技术加工泛用于各式
产业机械
●内转式平台
●高解析位置回馈系统
●瞬间转矩9.3~450Nm可选IP65防护等级
●可选安全、定位煞车
●可选用霍尔感测器
产品应用
激光技术加工泛用于各式产业机械
搭配高解析增量式位置回馈系统,具备高动态反应、高扭力输出以及高精度定位的能力,可应用于需精准定位的工业需求。
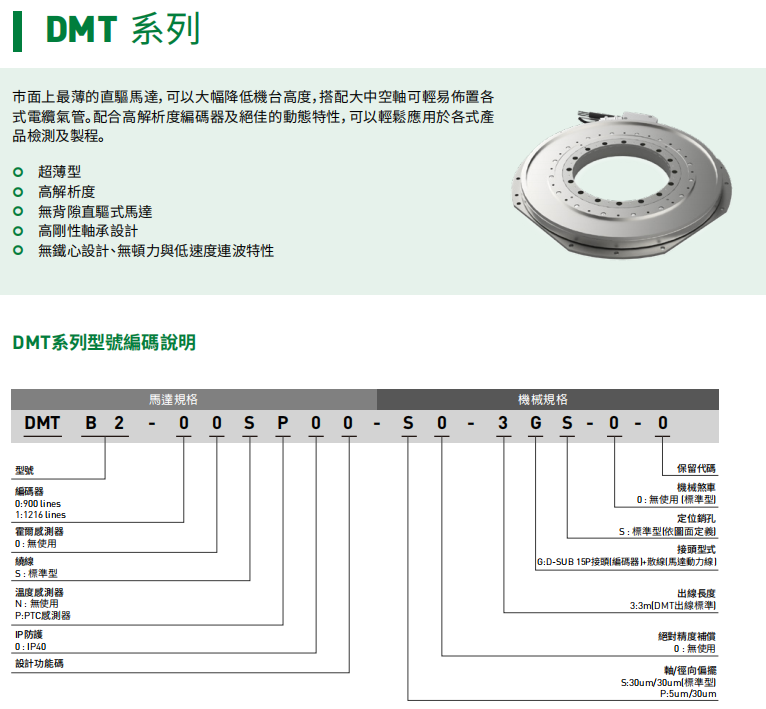
DMT系列
市面上最薄的直驱马达,可以大幅降低机台高度,搭配大中空轴可轻易布置各式电缆气管。配合高解析度编码器及绝佳的动态特性,可以轻鬆应用于各式产品检测及裂程。
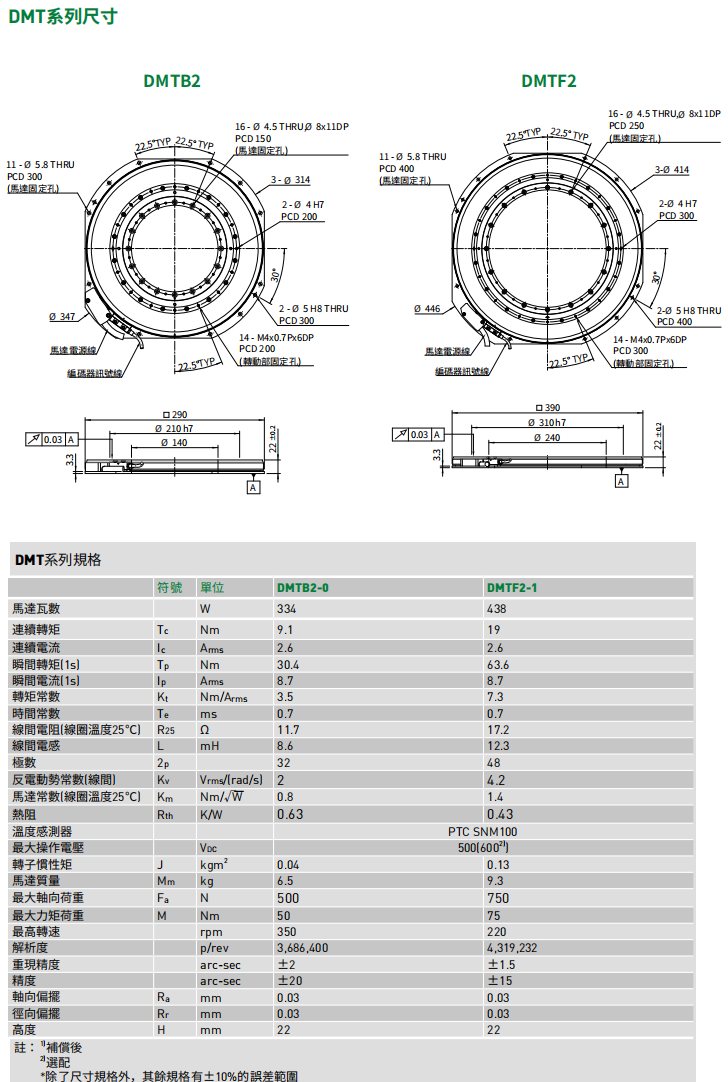
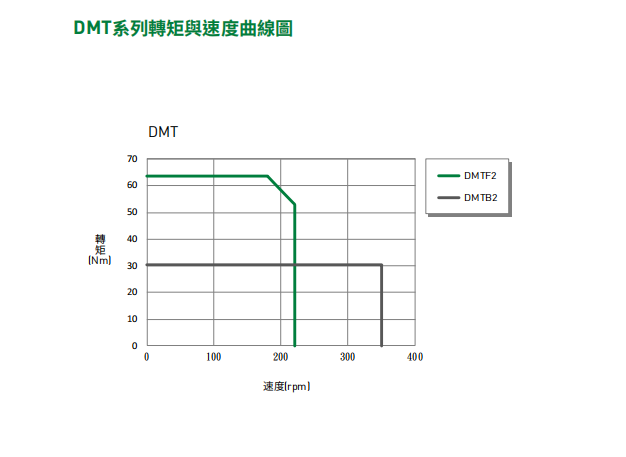
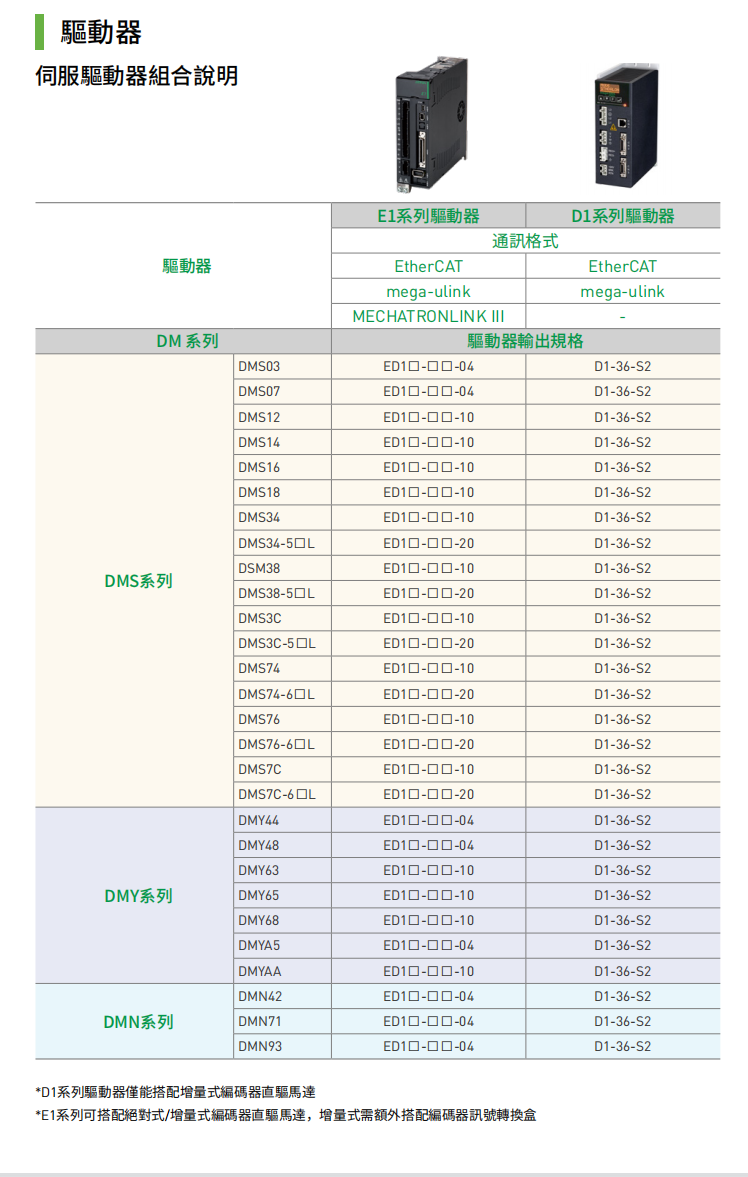
DMTB系列-DMTB2-0
DMTF系列-DMTF2-1
●超薄型
●高解析度
●无背隙直驱式马达
●高刚性轴承设计
●无铁心设计、无顿力与低速度连波特性
产品应用
AOI检测\半导体裂程
驱动器
伺服驱动器组合说明
DMY4系列
DMY6系列
DMYA系列
DMN系列
DMS系列
DMS0系列
DMS1系列
DMS3系列
DMS7系列
DMT系列
DMTB系列
DMTF系列
市面上最薄的直驱马达,可以大幅降低机台高度,搭配大中空轴可轻易布置各
式电缆气管。配合高解析度编码器及绝佳的动态特性,可以轻鬆应用于各式产
品检测及裂程。
。超薄型
。高解析度
。无背隙直驱式马达
。高刚性轴承 设计
。无铁心设计、无顿力与低速度连波特性
驱动器
伺服驱动器组合说明
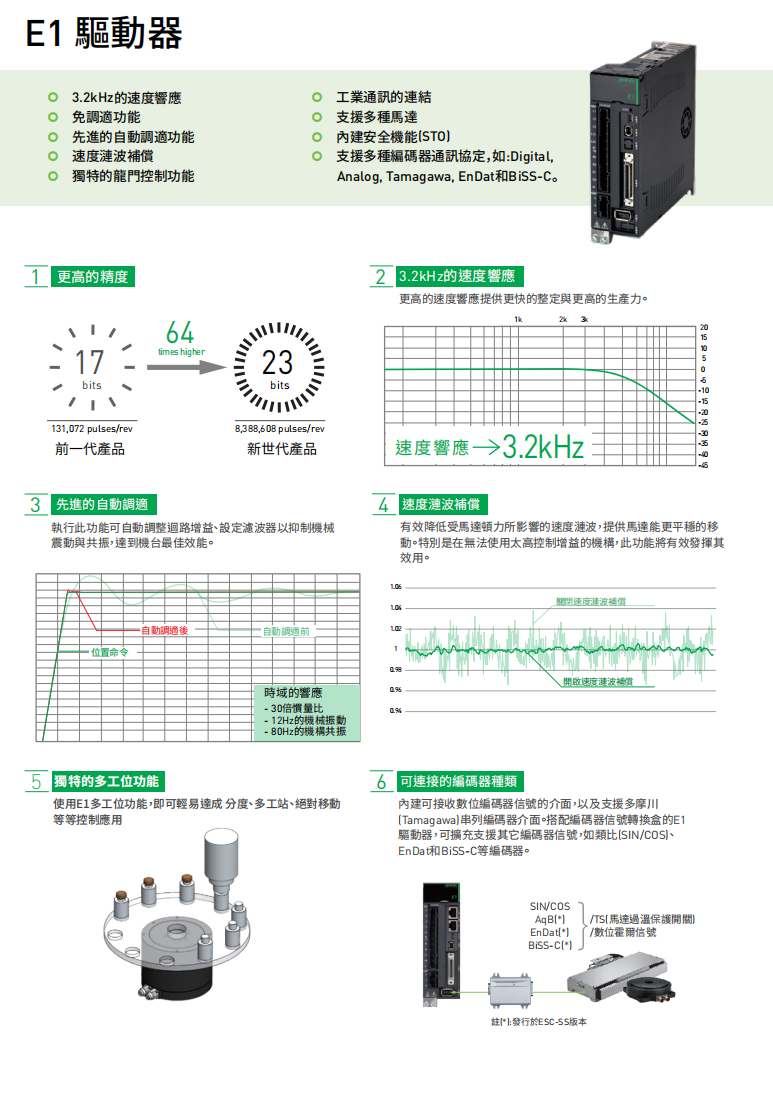
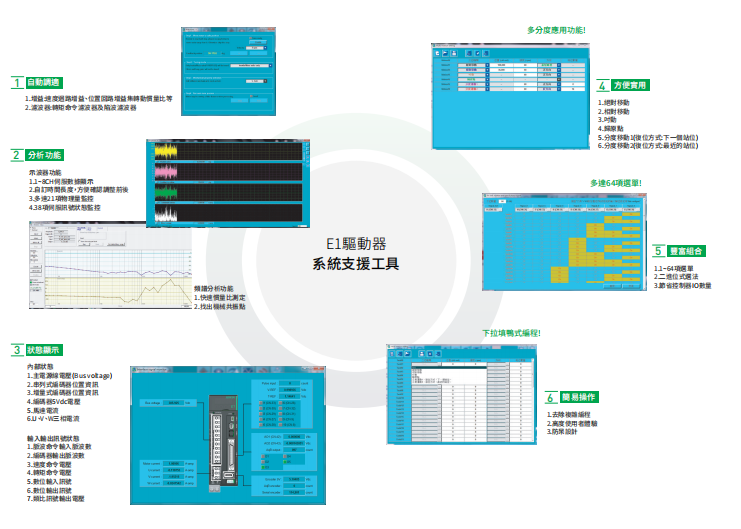
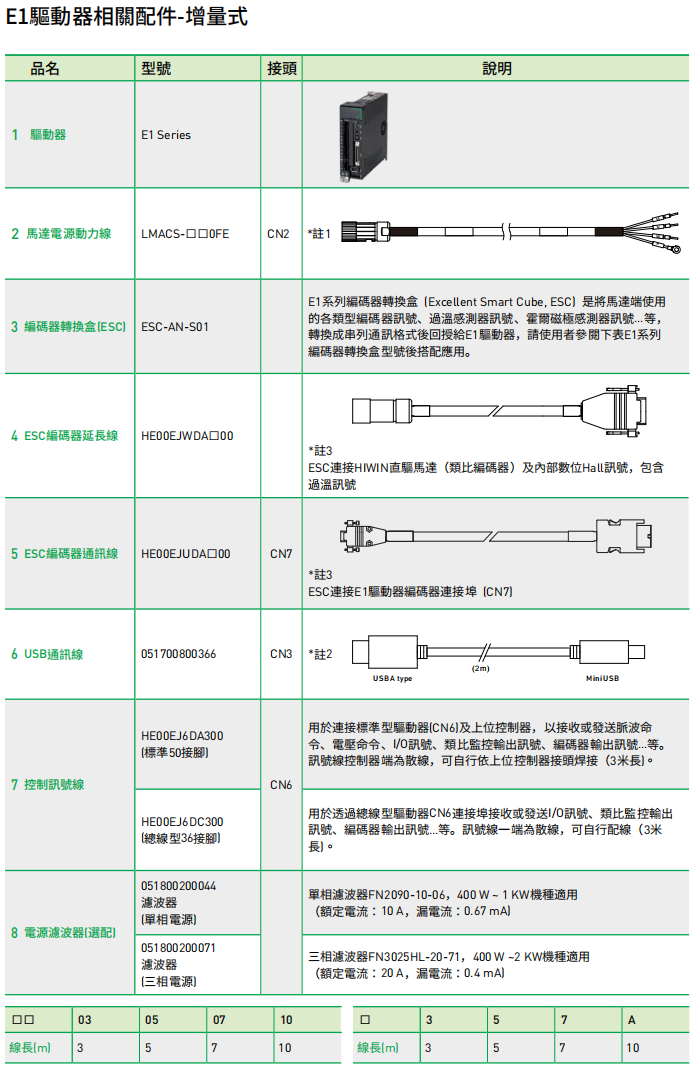
E1 驱动器
3.2kHz的速度响应
免调适功能
先进的自动调适功能
速度涟波补偿
独特的龙门控制功能
工业通讯的连结
支援多种马达
内建安全机能[STO)
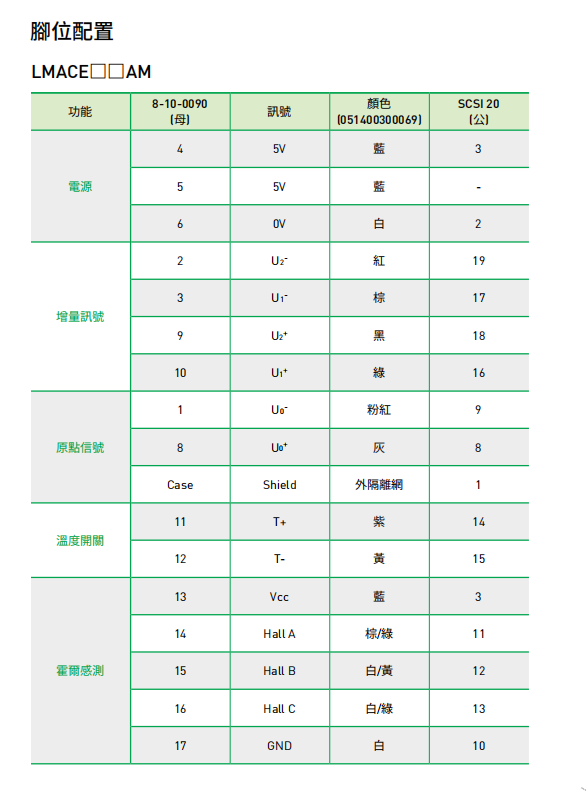
支援多 种编码器通讯协定,如:Digital,
Analog, Tamagawa, EnDat和BiSS-C。
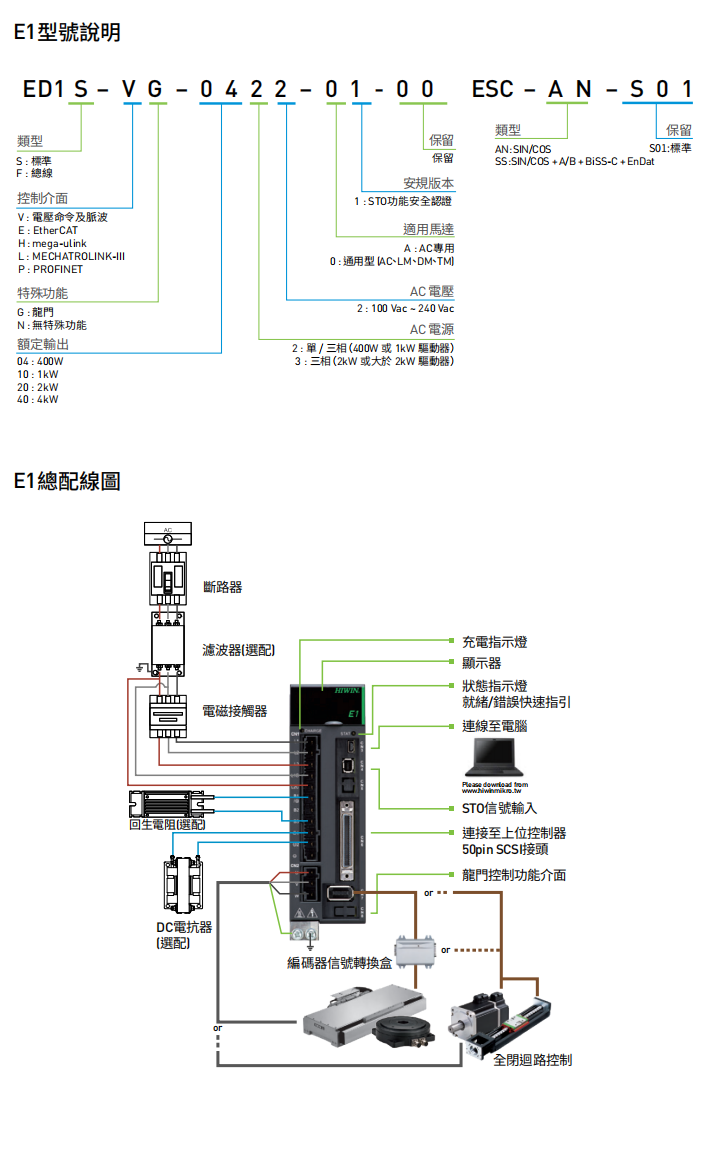
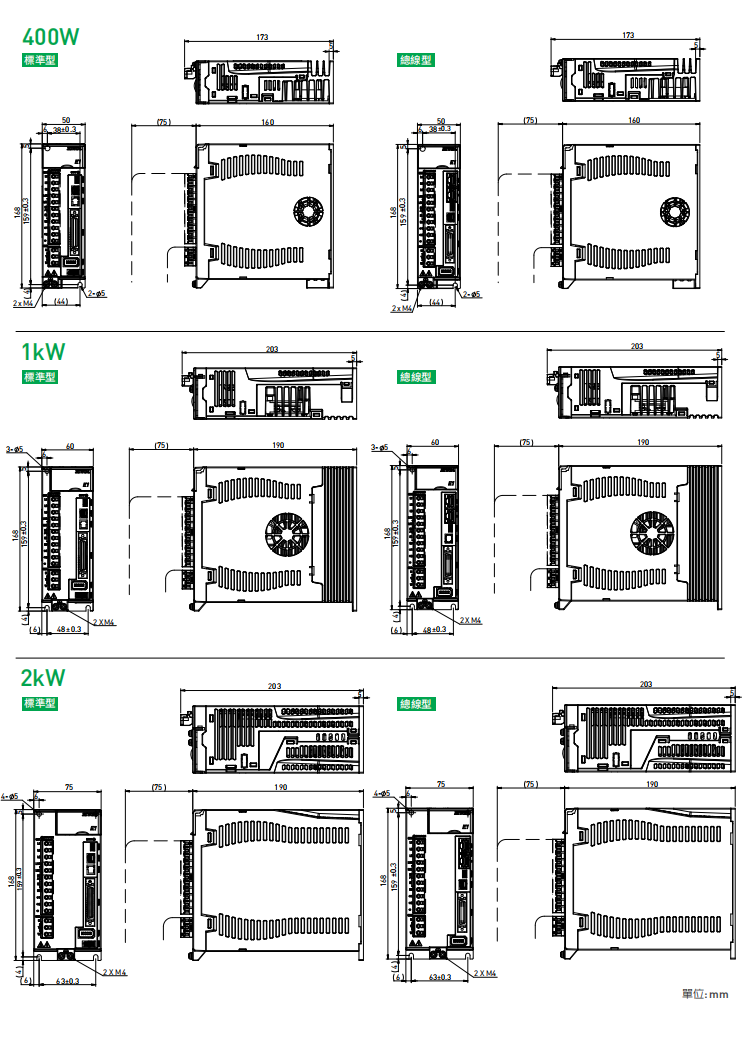
400W
1kW
2kW
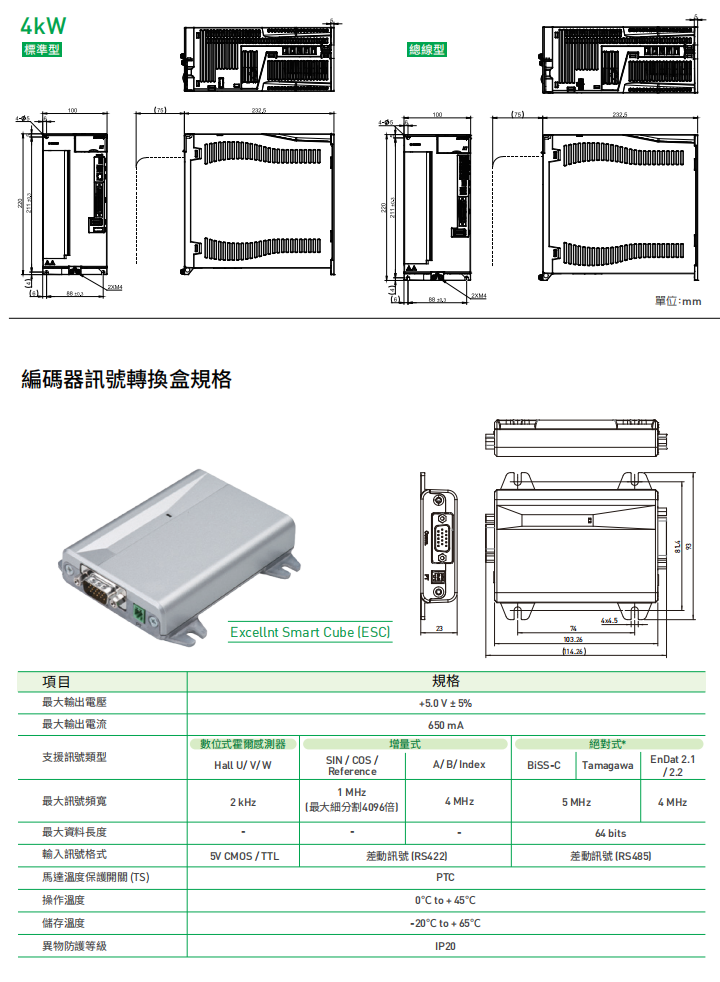
4kW
400W
1kW
2kW
4kW
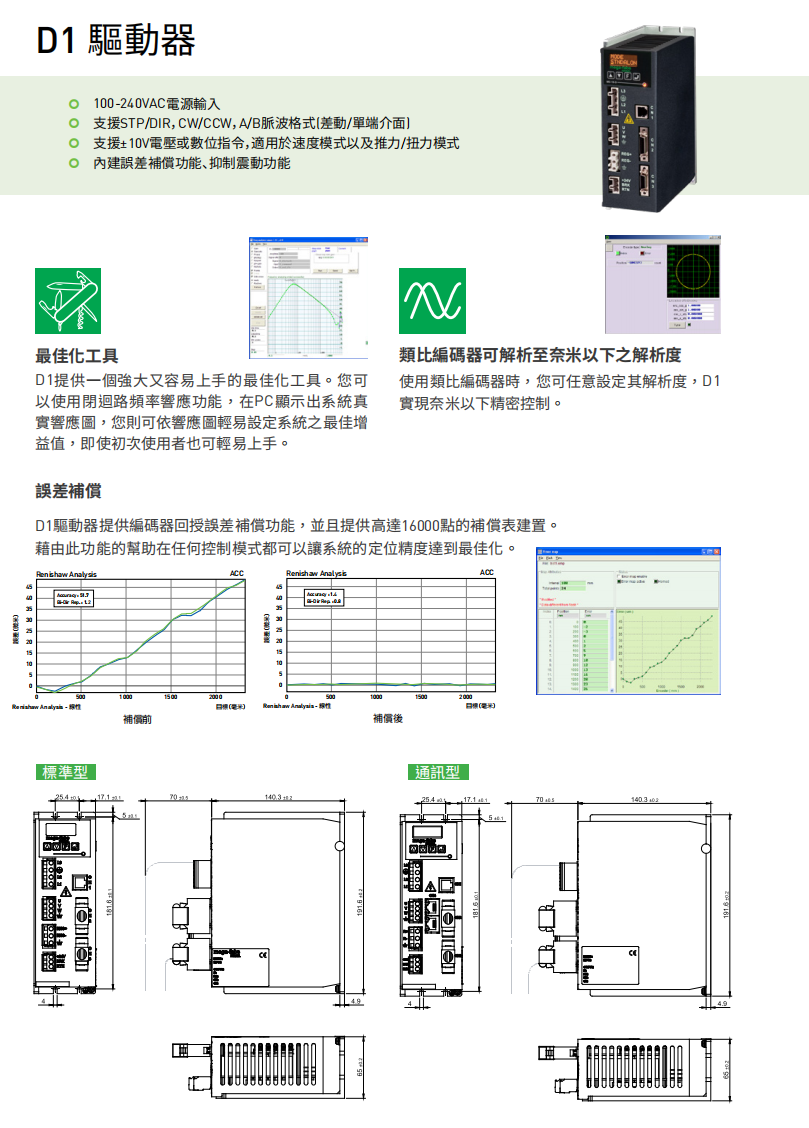
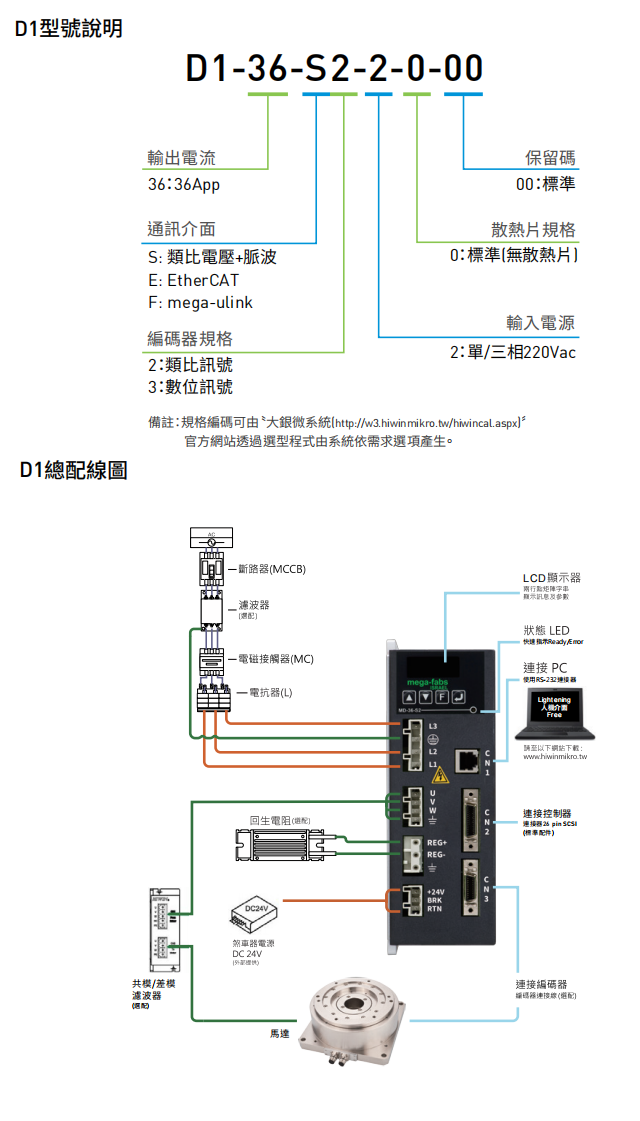
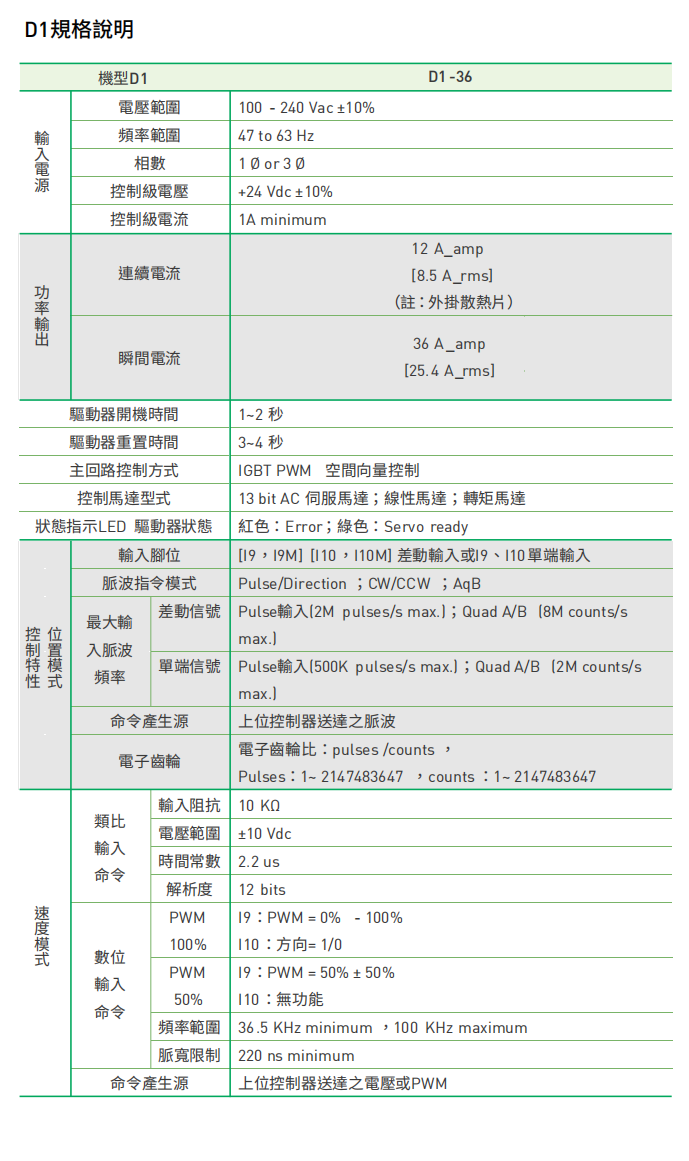
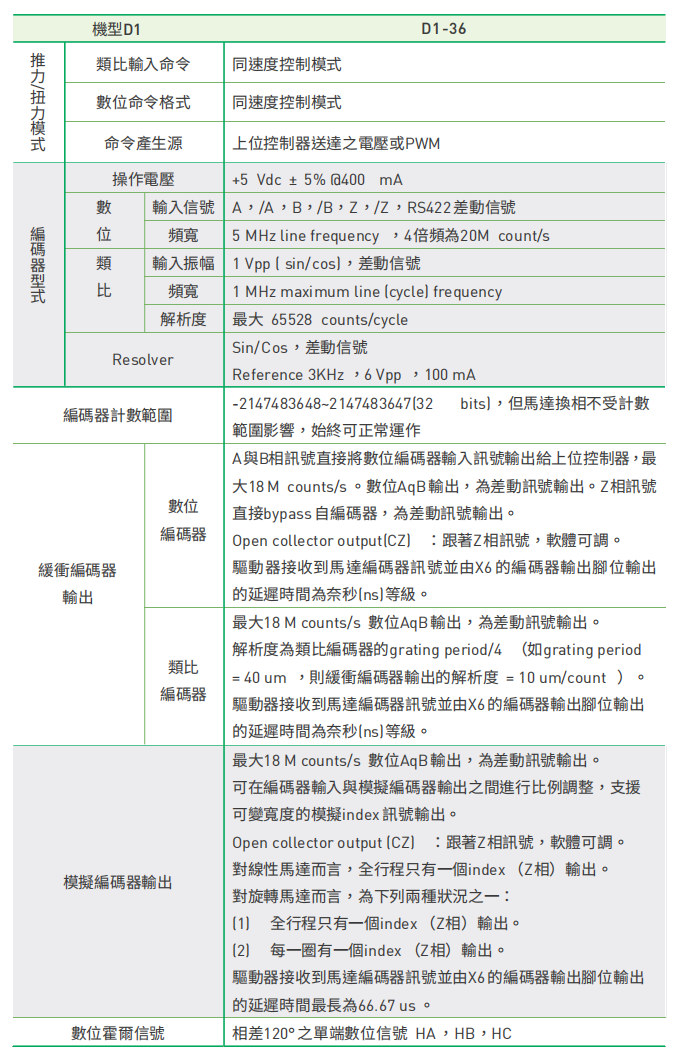
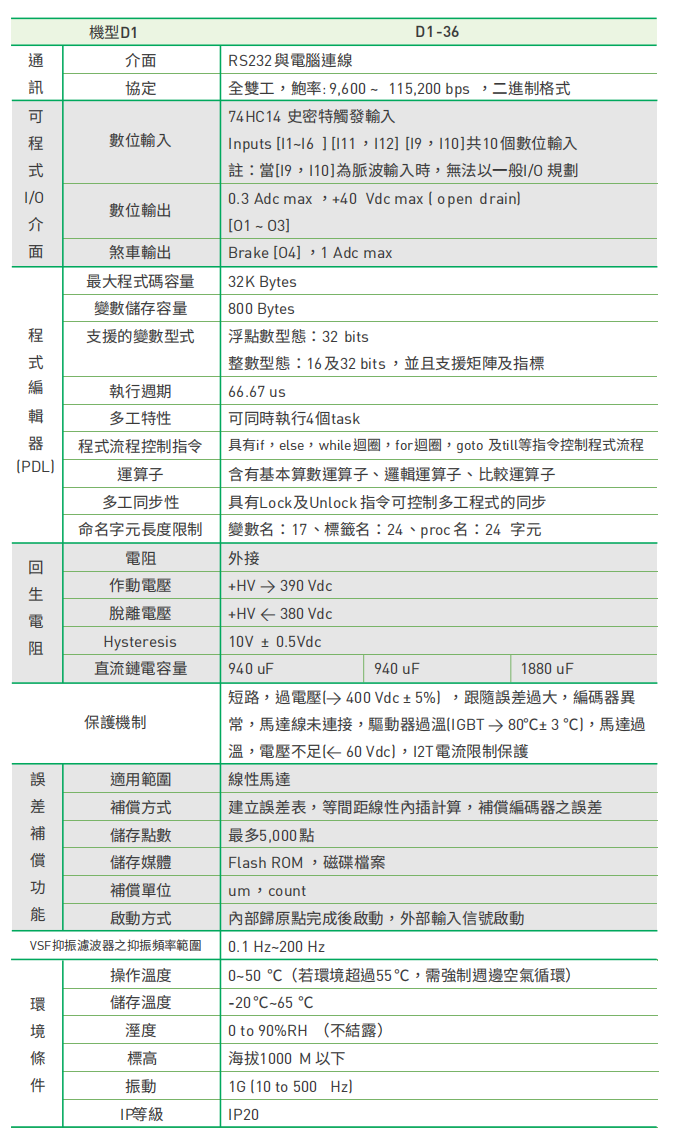
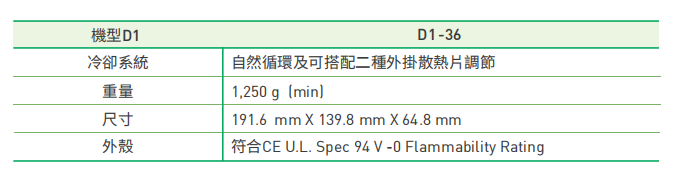
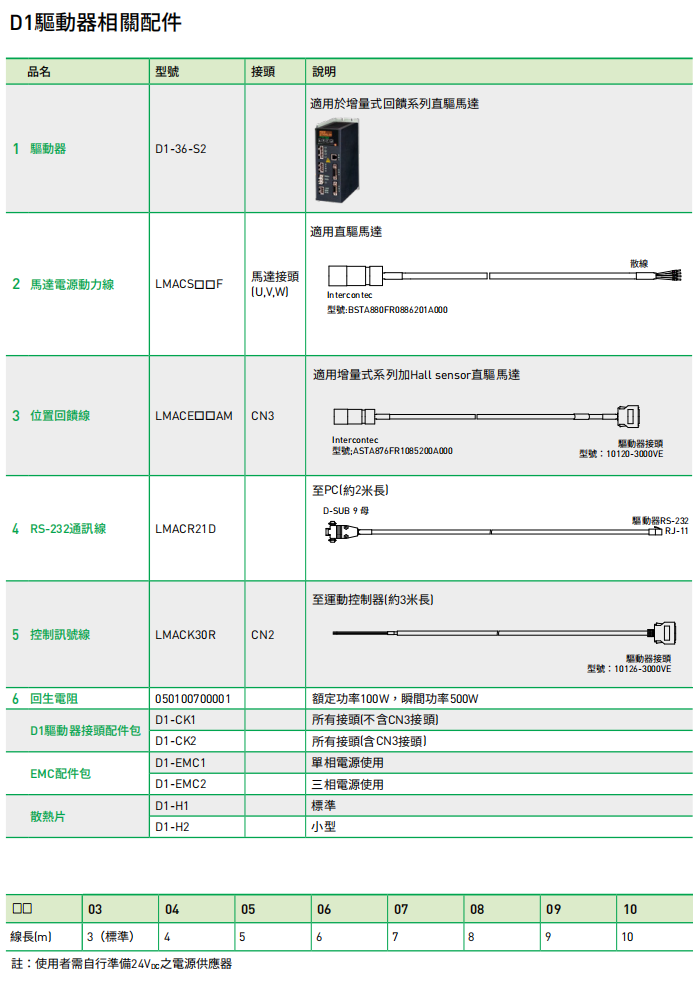
D1 驱动器
100-240VAC电源输入
支援STP/DIR,CW/CCW,A/B脉波格式(差动/单端介面)
支援±10V电压或数位指令,适用于速度模式以及推力/扭力模式
内建误差补偿功能、抑制震动功能
附录A: 马达选配
附录A: 马达选配
开始选配马达
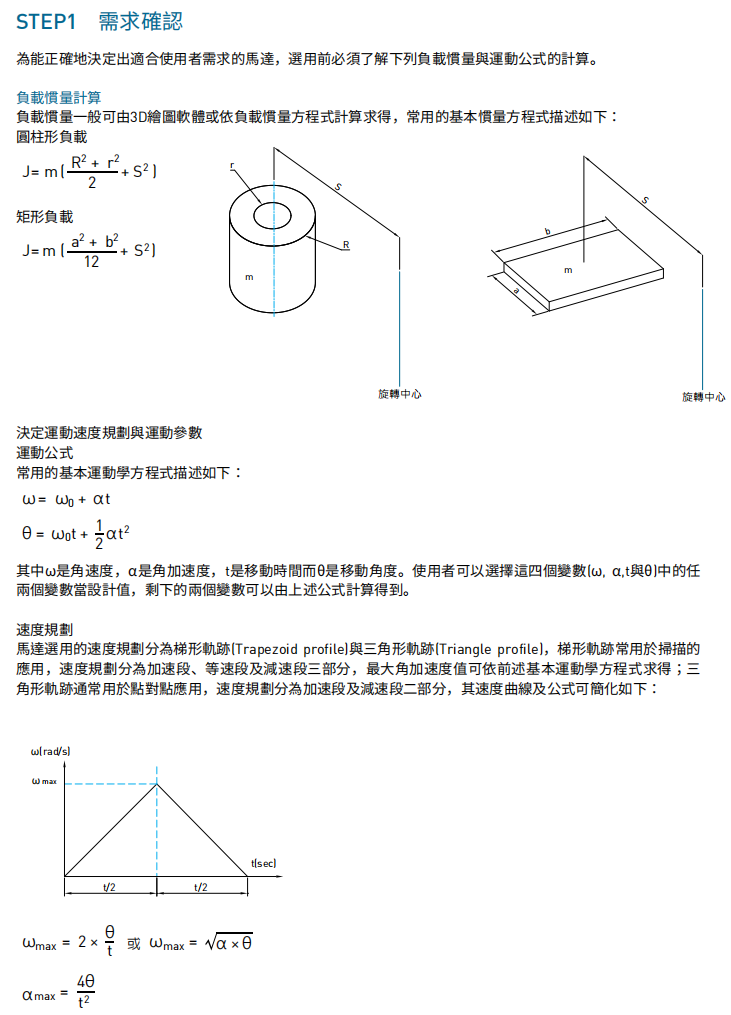
以下内容将说明如何根据速度、行程、负载等需求来选择合适的马达。进行选配工作的基本流程如下:
开始选配马达
以下内容将说明如何根据速度、行程、负载等需求来选择合适的马达。进行选配工作的基本流程如下:
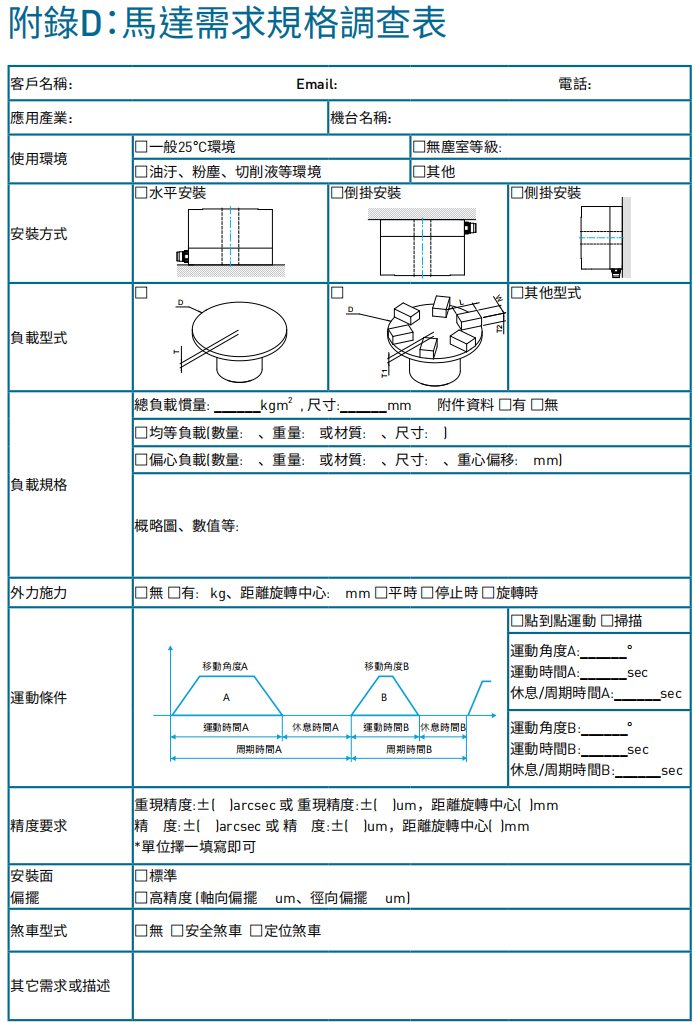
需求确认
。使用环境
。安装方式(水平、侧挂]
。驱动方式
。负载条件[负载惯量、摩擦力、切削力]
。速度条件[最大加速度、最大速度]
。Duty cycle
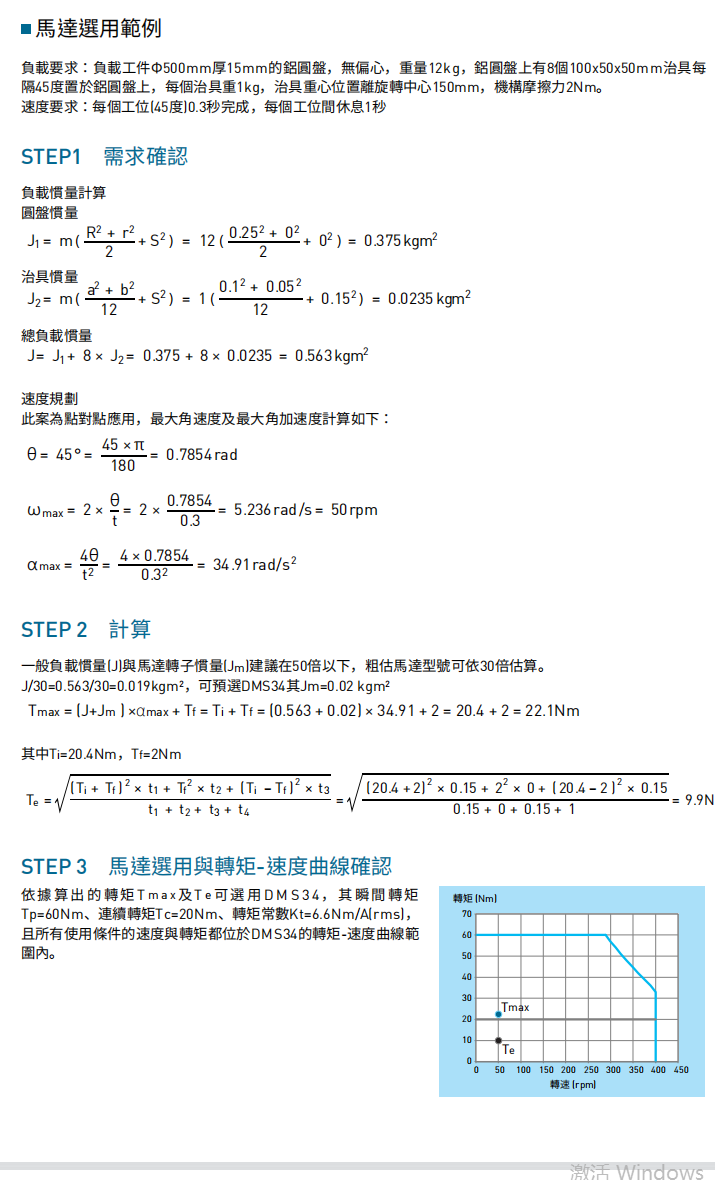
转矩计算
。计算各使用条件速度与对应之转矩
。计算等效转矩
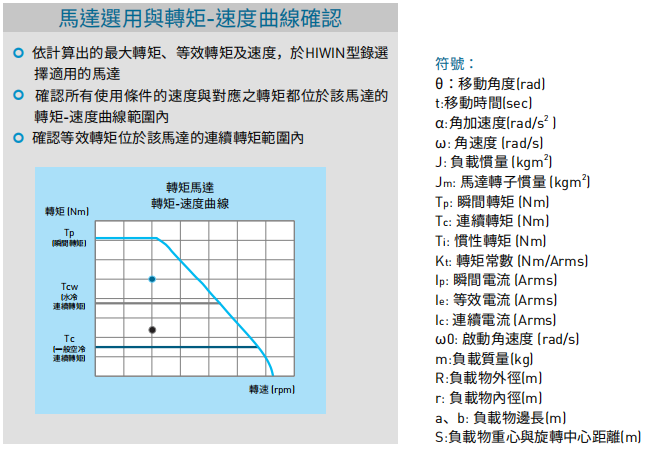
马达选用与转矩-速度曲线确认
。依计算出的最大转矩、等效转矩及速度,于HIWIN型录选择适用的马达
。确认所有使用条件的速度与对应之转矩都位于该马达的转矩-速度曲线范围内
。确认等效转矩位于该马达的连续转矩范围内

技术用语
1.反电动势常数[线间]: 
反电动势常数定义为马达在磁石温度25°C时,单位转速下所产生之感应电压。发生于线圈感应到磁场变化时,反抗电流通过的电动势。
2.连续电流: Ic/Icw (Arms)
连续电流定义为在环境温度25°C下可连续供给马达线圈之电流,且线圈温度最高不会超过温度100°C(水冷T MRW系列为120°C],此时马达达到额定连续转矩Tc ;因连续电流与线圈温度有关,水冷马达TMRW系列会有相对应空冷下之连续电流lc以及水冷下之连续电流Icw。
3.连续转矩: Tc/Tcw (Nm]
连续转矩定义为马达在环境温度25°C下连续运转不休息且线圈最终温度不超过线圈工作温度100°C(水冷TMRW系列为120°C])所输出的转矩,此连续转矩对应施加给马达之连续电流lc/Icw ;因连续转矩与线圈温度有关,水冷马达TMRW系列有其对应空冷下之连续电流Tc以及水冷下之连续电流Tcw。
4.线间电感: L ([mH)
线间电感定义为马达在连续电流lc/Icw下时所量测之线圈线间电感值。
5.线间电阻: R25 【Ω】
线间电组定义为马达在线圈温度25°C时所量测之线圈线间电阻值。
6.马达常数:
马达常数定义为在线圈以及磁石温度25°C时马达输出转矩对消耗功率开根号的比值,越高的马达常数代表马达在输出特定转矩时会有越低的功率损失。
7.极数: 2p
极数2p定义为转子的总极数,其中p为极对数。
8.瞬间电流: Ip [Arms)
瞬间电流定义为马达达到最大推力下所对应之瞬间大电流,而电流所达到之马达温度不可使磁铁退磁;一般来说,马达在正常操作范围,瞬间电流可允许供给--秒,然后需确保散热至正常温度后才可再供给瞬间电流。
9.瞬间转矩: Tp (Nm)
瞬间转矩定义为此马达输出不超过一秒之最大转矩,此转矩对应之瞬间电流不可使磁铁退磁。
10.转子惯性矩: J (kgm3)
转子惯性矩定义为转动部抵抗转动的惯性,与外型以及质量有关。
11.堵转电流: I/Isw [Arms)
堵转电流定义为当马达在环境温度25°C下且马达为堵转条件下所能供给之电流上限;因与散热条件有关,水冷式马达TMRW系列会有对应空冷下堵转电流|ls以及水冷下堵转电流Isw。
12.堵转转矩: Ts/Tsw[Nm)
堵转转矩定义为当马达在环境温度25°C下且马达为堵转条件下所能供给之转矩上限;因与散热条件有关,水冷式马达TMRW系列会有对应空冷下堵转力矩Ts以及水冷下堵转转矩Tsw。
13.热阻: Rth/Rthw [K/W)
热阻定义为热量从马达线圈内到散热环境所受到之阻力(空冷为25°C下马达外部自然对流与辐射,水冷则为马达外部以水温25°C强制水冷) ; 热阻越高表示相同热量输入下,线圈与散热环境的温差越大。
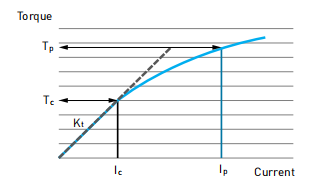
14.转矩常数: Kt (Nm/Arms)磁石温度25°C .
转矩常数定义为马达在单位电流[Arms]下所能输出的转矩;除TMRW水冷马达系列外,其馀系列在正常工作范围下,输出转矩与输入电流接近线性关傈,非线性部份是因铁心饱和所导致。
15.最高转速[RPM)
最高转速定义为在特定转矩下(- 般为连续转矩),所能提供的最高转速;若内部有安装轴承则最高转速会受限于轴承的DN值;在水冷马达中有定义三种情况的最高转速: 空冷连续转矩下最高转速、水冷连续转矩^下最高转速及瞬间转矩下最高转速。.
16.额定转速w,[RPM]
额定转速定义为在马达连续运转不休息的情况下,转子不会因铁损造成转子温度过高[>80°C]而损坏的转速;如果超过该转速必须降低工作遇期或者提供转子额外散热设计。马达工作区间解说请参考17 转矩与速度曲线图。
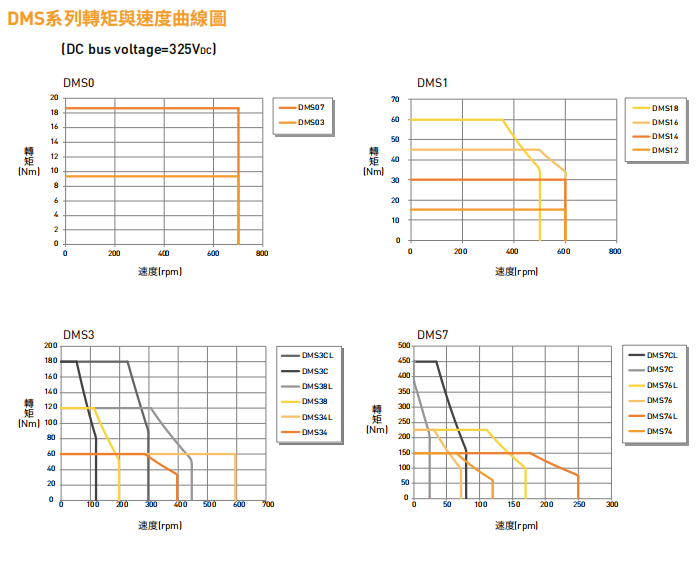
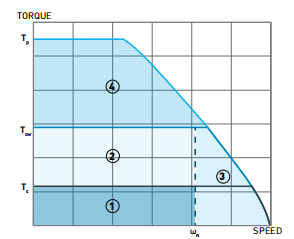
17.转矩与转速曲线图
转矩与转速曲线图定义为马达一定输入电压 下,所能够输出的转矩与转速对照图,考虑马达温升的情况
可以将该图分割为四个操作区间如下图:
①:马达在空冷且转矩小于T。的情况下,可连续运转于w以下不休息。
①+②:马达在水冷且转矩小于T的情况下,可连续运转于w,以下不休息。
③:马达在空冷且转矩小于T下或在水冷且转矩小于的情况下,转速大于wn,必须降低工作遇期或者提供转子额外散热,避免转子过热。
④:马达在空冷且转矩大于T或在水冷且转矩大于w的情况下,必须降低工作遇期,在达到T。的情况下最多只能持续输出1秒,避免定子过热。
18.最大操作电压(Voc] :
最大操作电压定义为马达正常工作环境所能使用的最大电压。
19.解析度: p/rev
解析度定义为马达位置回馈系统在-圈内所细分割的数量。
20.精度: arc-sec
精度定义为目标位置与实际位置间的误差; 在HIWIN的定义下,马达每22.5°正反转两趋量测,取其误差最大范围定义之。
21. (双向]重现精度: arc-sec
重现精度定义为马达移动到相同角度下,精度的重现性。
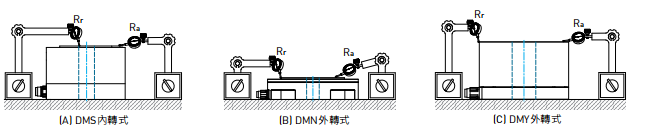
22.轴向偏摆与径向偏摆:
轴向偏摆定义为马达旋转时,量测客户安装面与旋转轴平行方向所得之偏摆量Ra ;径向偏摆则定义为马达旋转时,量测客户安装面与旋转轴垂直方向所得之偏摆量Rr,其中因应马达类型不同,量测基准参考下图。
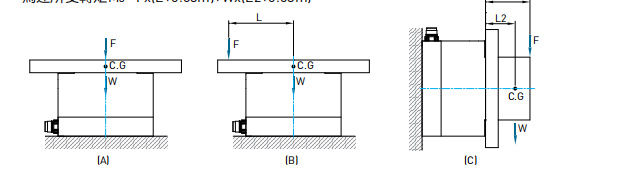
23.负载能力:
马达在使用时需考虑该马达结构所能承受的负载能力,可由外力以及安装方式计算该负载是否在马达结构可承受之范围内,计算过程中马达所受轴向力需小于马达最大轴向荷重Fi<Fa且承受转矩需小于马达最大转矩荷重Mi<M情况下,才可使用。
[A]外力=F
马达所受轴向力F1=F +负载重量W
马达所受转矩M1=0
(B]外力=F
马达所受轴向力F2=F +负载重量W
马达所受转矩M2 =FxL
[C]外力=F
马达所受轴向力F3=F+负载重量W
马达所受转矩M3 =Fx[L +0.03m]+Wx[L 2+0.03m]
附录E:常见问题
1. 内转式与外转式直驱马达的差异
同样体积的内转及外转直驱马达,外转型马达的扭力规格比较大,因为结构设计本身较容易实现较大扭力,外转式的转子先天上惯量就相对于内转式的大,因此搭配负载时,负载惯量比会比较小,也就相对比较容易控制。
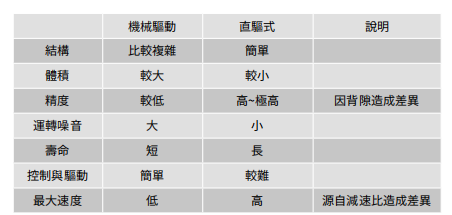
2.机械传动与直驱式马达的优劣分析
机械传动式具体是指透过减速机、皮带、蜗轮、螺捍等的传动,下面列出差异分析。
3.轴向与径向偏摆
对于直驱马达应用,轴向的偏摆比较重要,因工件乘载于马达上时,轴向偏摆反应出来的是工件旋转时的上上下下的飘动,不利于实际施工。
4.马达惯量的影响
对于直驱马达于自动化应用而言,常见于伺服马达上的惯量比要小于15或是10的规则,很难适用于直驱马达上,就结构而会直驱马达负载惯量容易一下子就是转子惯量的数十倍以上,通常此时就要考虑负载接合面与直驱马达的锁附刚性,较高的锁附刚性能让高负载惯量避免造成过低的第-共振频。
5.连续转矩和瞬间转矩对于马达的意义
连续转矩维马达可以持续提供电流所得的转矩,而瞬间转矩为更高电流打入得到的转矩,但因为电流比较高所以无法持续打入,只能够限定打入几秒或更短时间,否则会造成马达破坏。实务上,瞬间转矩都应用于加减速的运动区段,好比短跑选手的加减速,瞬间爆发出来,但无法持续而不休息。而连续转矩则用来与实际运动计算出的等效转矩相互比较,当等效转矩小于连续转矩,则该设计没问题,若等效转矩超过该马达的连续转矩,此时马达会过热造成马达损坏。
6.定位煞车与安全煞车
定位煞车:应用于马达到位后夹持,减少马达抵抗外部扭矩的负担安全煞车:应用于预防机台断电导致撞机或移动风险。


TMS7CLGH(DMS7CLGH))旋转平台(注意新款以D开头)
TMS0(DMSO)系列
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS0(DMSO)系列(注意新款以D开头)
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS1(DMS1)系列(注意新款以D开头)
TMS12G(DMS12G)
TMS12GH(DMS12GH)
TMS14G(DMS14G)
TMS14GH(DMS14GH)
TMS16G(DMS16G)
TMS16GH(DMS16GH)
TMS18G(DMS18G)
TMS18GH(DMS18GH)
TMS3(DMS3)系列(注意新款以D开头)
TMS32G(DMS32G)
TMS32GH(DMS32GH)
TMS34G(DMS34G)
TMS34GH(DMS34GH)
TMS34LG(DMS34LG)
TMS34LGH(DMS34LGH)
TMS38G(DMS38G)
TMS38GH(DMS38GH)
TMS38LG(DMS38LG)
TMS38LGH(DMS38LGH)
TMS3CG(DMS3CG)
TMS3CGH(DMS3CGH)
TMS3CLG(DMS3CLG)
TMS3CLGH(DMS3CLGH)
TMS7(DMS7)系列(注意新款以D开头)
TMS74G(DMS74G)
TMS74GH(DMS74GH)
TMS74LG(DMS74LG)
TMS74LGH(DMS74LGH)
TMS76G(DMS76G)
TMS76GH(DMS76GH)
TMS76LG(DMS76LG)
TMS76LGH(DMS76LGH)
TMS7CG(DMS7CG)
TMS7CGH(DMS7CGH)
TMS7CLG(DMS7CLG)
TMY(DMY)旋转平台(注意新款以D开头)
TMY4(DMY4)系列(注意新款以D开头)
TMY44(DMY44)
TMY48(DMY48)
TMY6(DMY6)系列(注意新款以D开头)
TMY63G(DMY63G)
TMY63GH(DMY63GH)
TMY63(DMY63 )
TMY65G(DMY65G)
TMY65GH(DMY65GH)
TMY65(DMY65)
TMY68G(DMY68G)
TMY68GH(DMY68GH)
TMY68(DMY68)
TMYA(DMYA)系列(注意新款以D开头)
TMYA5G(DMYA5G)
TMYA5GH(DMYA5GH)
TMYA5(DMYA5)
TMYAAG(DMYAAG)
TMYAAGH(DMYAAGH)
TMYAA(DMYAA)
TMN旋转平台 (注意新款以D开头)
TMN(DMN)增量式系列
TMN21(DMN21)
TMN42G(DMN42G)
TMN42GH(DMN42GH)
TMN71G(DMN71G)
TMN71GH(DMN71GH)
TMN93G(DMN93G)
TMN93GH(DMN93GH)
TMN95G(DMN95G)
TMN95GH(DMN95GH)
力矩马达-TMRW(DMRW)水冷式转矩马达(注意新款以D开头)
TMRW1(DMRW1)系列(注意新款以D开头)
TMRW13(DMRW13)
TMRW13L(DMRW13L)
TMRW15(DMRW15)
TMRW15L(DMRW15L)
TMRW17(DMRW17)
TMWR17L(DMWR17L)
TMRW1A(DMRW1A)
TMRW1AL(DMRW1AL)
TMRW1F(DMRW1F)
TMRW1FL(DMRW1FL)
TMRW2(DMRW2)系列(注意新款以D开头)
TMRW23(DMRW23)
TMWR23L(DMWR23L)
TMRW25(DMRW25)
TMRW25L(DMRW25L)
TMRW27(DMRW27)
TMRW27L(DMRW27L)
TMRW2A(DMRW2A)
TMRW2AL(DMRW2AL)
TMRW2F(DMRW2F)
TMRW2FL(DMRW2FL)
TMRW4(DMRW4)系列(注意新款以D开头)
TMRW43(DMRW43)
TMRW43L(DMRW43L)
TMRW45(DMRW45)
TMRW45L(DMRW45L)
TMRW47(DMRW47)
TMRW47L(DMRW47L)
TMRW4A(DMRW4A)
TMRW4AL(DMRW4AL)
TMRW4F(DMRW4F)
TMRW4FL(DMRW4FL)
TMRW7(TMRW7)系列(注意新款以D开头)
TMRW73(DMRW73)
TMRW73L(DMRW73L)
TMRW75(DMRW75)
TMRW75L(DMRW75L)
TMRW77(DMRW77)
TMRW77L(DMRW77L)
TMRW7A(DMRW7A)
TMRW7AL(DMRW7AL)
TMRW7F(DMRW7F)
TMRW7FL(DMRW7FL)
TMRWA(DMRWA)系列(注意新款以D开头)
TMRWA3(DMRWA3)
TMRWA3L(DMRWA3L)
TMRWA5(DMRWA5)
TMRWA5L(DMRWA5L)
TMRWA7(DMRWA7)
TMRWA7L(DMRWA7L)
TMRWAA(DMRWAA)
TMRWAAL(DMRWAAL)
TMRWAF(DMRWAF)
TMRWAFL(DMRWAFL)
TMRWD(DMRWD)系列(注意新款以D开头)
TMRWD3(DMRWD3)
TMRWD3L(DMRWD3L)
TMRWD5(DMRWD5)
TMRWD5L(DMRWD5L)
TMRWD7(DMRWD7)
TMRWD7L(DMRWD7L)
TMRWDA (DMRWDA)
TMRWDAL(DMRWDAL)
TMRWDF(DMRWDF)
TMRWDFL(DMRWDFL)
TMRWG(DMRWG)系列(注意新款以D开头)
TMRWG7(DMRWG7)
TMRWG7L(DMRWG7L)
TMRWGA(DMRWGA)
TMRWGAL(DMRWGAL)
TMRWGF(DMRWGF)
TMRWGFL(DMRWGFL)
力矩马达-TMRI高速水冷式转矩马达(注意新款以D开头)
TMRIA(DMRIA)系列 (注意新款以D开头)
TMRIA5-WA(DMRIA5-WA)
TMRIA5-WB(DMRIA5-WB)
TMRIA7-SC(DMRIA7-SC)
TMRIA7-WC(DMRIA7-WC)
TMRIAA-SC(DMRIAA-SC)
TMRIAA-WC(DMRIAA-WC)
TMRIAF-WC(DMRIAF-WC)
TMRIAF-WF(DMRIAF-WF)
TMRIG(DMRIG)系列 (注意新款以D开头)
TMRIG5-SB(DMRIG5-SB)
TMRIG5-WD(DMRIG5-WD)
TMRIG5-WH(DMRIG5-WH)
TMRIG7-SB(DMRIG7-SB)
TMRIG7-WD(DMRIG7-WD)
TMRIG7-WH(DMRIG7-WH)
TMRIGA-SB(DMRIGA-SB)
TMRIGA-WD(DMRIGA-WD)
TMRIGA-WH(DMRIGA-WH)
TMRIGF-SB(DMRIGF-SB)
TMRIGF-WD(DMRIGF-WD)
TMRIGF-WH(DMRIGF-WH)
TMY(DMY)旋转平台
TMY4(DMY4)系列
TMY44(DMY44)
TMY48(DMY48)
TMY6(DMY6)系列
TMY63G(DMY63G)
TMY63GH(DMY63GH)
TMY63(DMY63 )
TMY65G(DMY65G)
TMY65GH(DMY65GH)
TMY65(DMY65)
TMY68G(DMY68G)
TMY68GH(DMY68GH)
TMY68(DMY68)
TMYA(DMYA)系列
TMYA5G(DMYA5G)
TMYA5GH(DMYA5GH)
TMYA5(DMYA5)
TMYAAG(DMYAAG)
TMYAAGH(DMYAAGH)
TMYAA(DMYAA)
TMS0(DMSO)系列
TMS03G(DMS03G)
TMS03GH(DMS03GH)
TMS07G(DMS07G)
TMS07GH(DMS07GH)
TMS1(DMS1)系列
TMS12G(DMS12G)
TMS12GH(DMS12GH)
TMS14G(DMS14G)
TMS14GH(DMS14GH)
TMS16G(DMS16G)
TMS16GH(DMS16GH)
TMS18G(DMS18G)
TMS18GH(DMS18GH)
TMS3(DMS3)系列
TMS32G(DMS32G)
TMS32GH(DMS32GH)
TMS34G(DMS34G)
TMS34GH(DMS34GH)
TMS34LG(DMS34LG)
TMS34LGH(DMS34LGH)
TMS38G(DMS38G)
TMS38GH(DMS38GH)
TMS38LG(DMS38LG)
TMS38LGH(DMS38LGH)
TMS3CG(DMS3CG)
TMS3CGH(DMS3CGH)
TMS3CLG(DMS3CLG)
TMS3CLGH(DMS3CLGH)
TMS7(DMS7)系列
TMS74G(DMS74G)
TMS74GH(DMS74GH)
TMS74LG(DMS74LG)
TMS74LGH(DMS74LGH)
TMS76G(DMS76G)
TMS76GH(DMS76GH)
TMS76LG(DMS76LG)
TMS76LGH(DMS76LGH)
TMS7CG(DMS7CG)
TMS7CGH(DMS7CGH)
TMS7CLG(DMS7CLG)
TMS7CLGH(DMS7CLGH)
吴女士 13527953137
上一篇:没有了
下一篇:没有了